


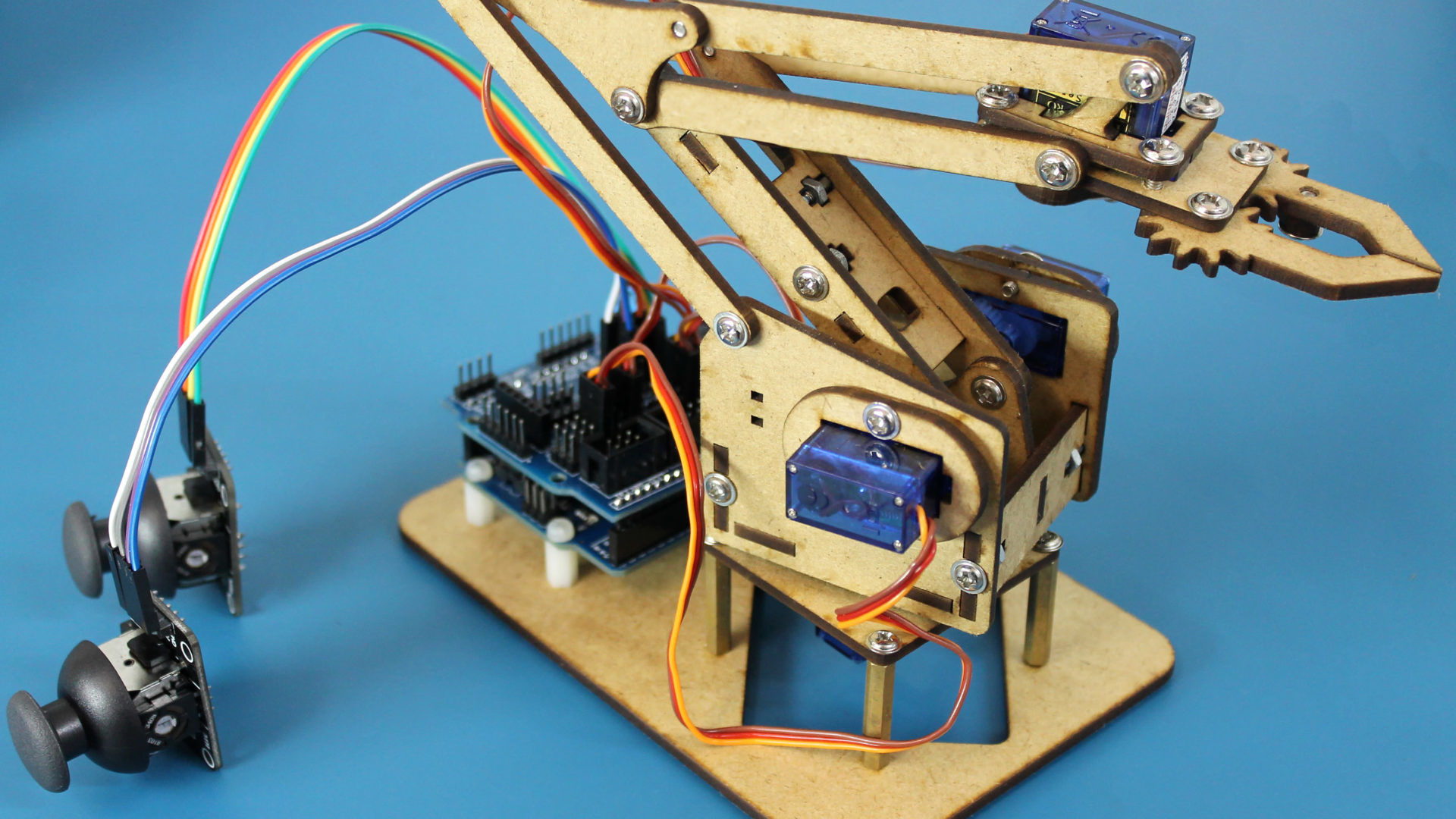
O Braço Robótico Arduino é um mecanismo desenvolvido para quem está iniciando no ramo de automação de robôs, proporcionando diversas possibilidades de movimento e ações nos mais diversos projetos. Comumente é utilizado em conjunto com microcontroladores Raspberry Pi ou Arduino, por exemplo.
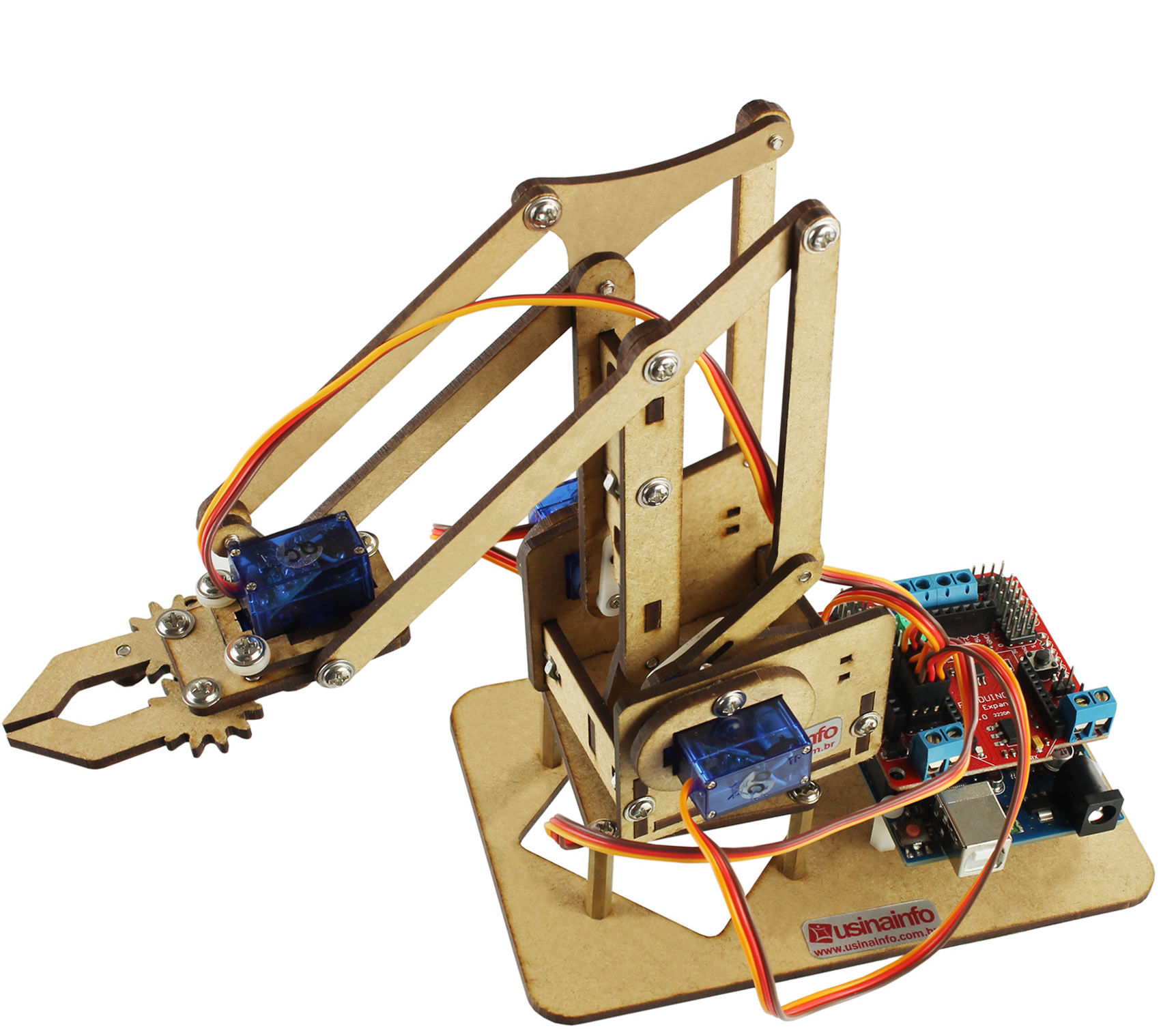
Braço Robótico Arduino
Criado com o intuito de ser considerado uma ferramenta de baixo custo e grande funcionalidade, ele deve ser montado junto de 4 Micro Servo Motores de 180º, responsáveis pelos movimentos executados pelo mesmo.
Comumente os Servos são conectados diretamente ao Arduino, porém neste caso como trabalhamos com uma maior quantidade de servos, faremos uso de um drive controlador capaz de alimentar e controlar os servos motores em questão sem reduzir a sua capacidade e conseguindo suprir a corrente necessário por todos os equipamentos.
Para aumentar a capacidade do Arduino e expandir o seu número de portas de entrada e saída, vamos utilizar um Arduino Sensor Shield.
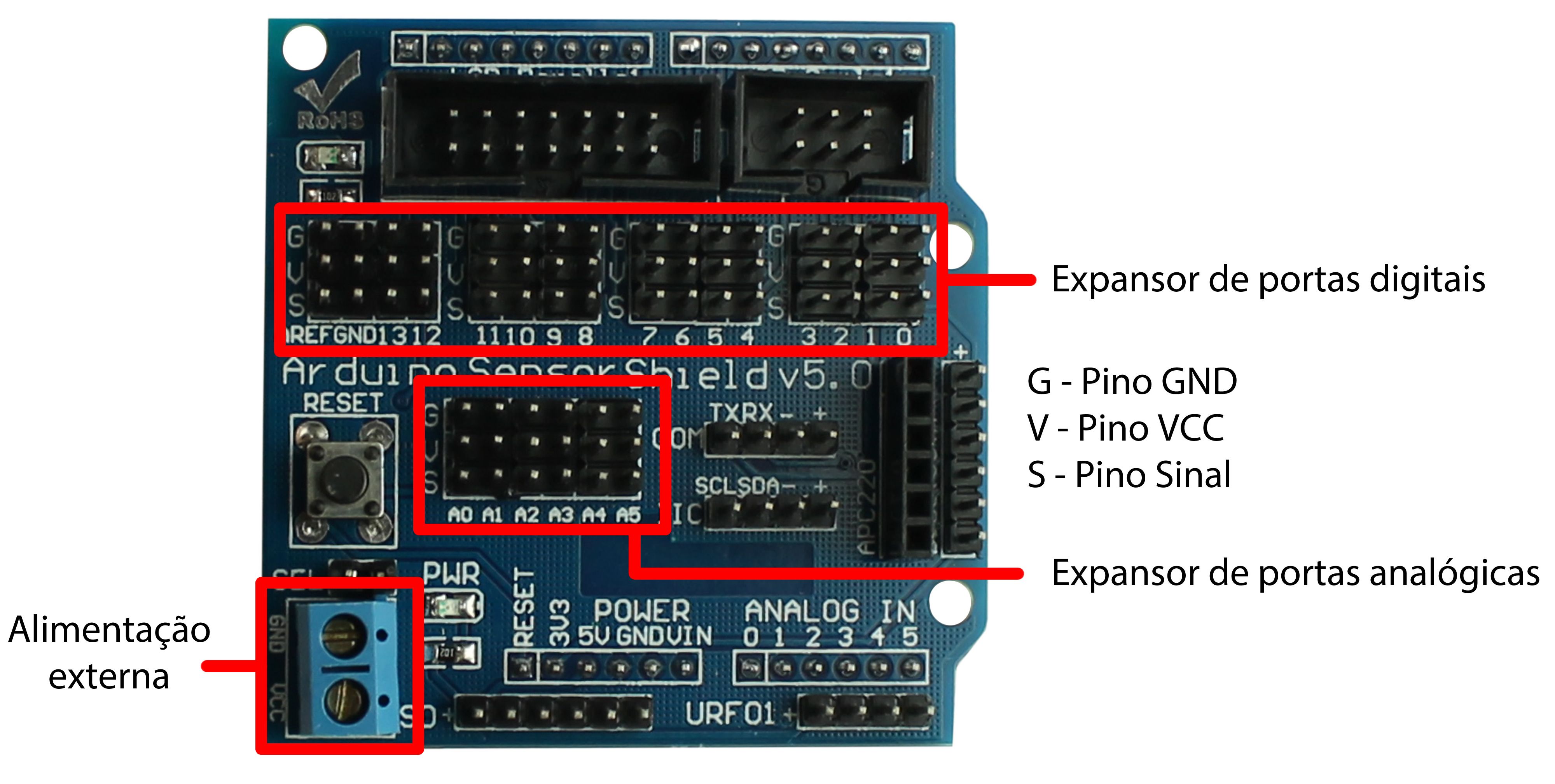
Arduino Sensor Shield
Para o controle do movimento de cada motor, vamos utilizar um joystick que conforme será movimentado, irá realizar o movimento do servo e consequentemente do braço robótico de forma instantânea.
Para realizar o referente projeto, precisará de uma biblioteca especial não existente em seu histórico do Arduino, deste modo, entre no site Github e faça o download da biblioteca principal.
Ao clicar no link acima, uma janela semelhante a esta irá aparecer e então você devera ir até o botão verde escrito “Clone or download” e realizar o Download da biblioteca clicando em Download ZIP, observe:
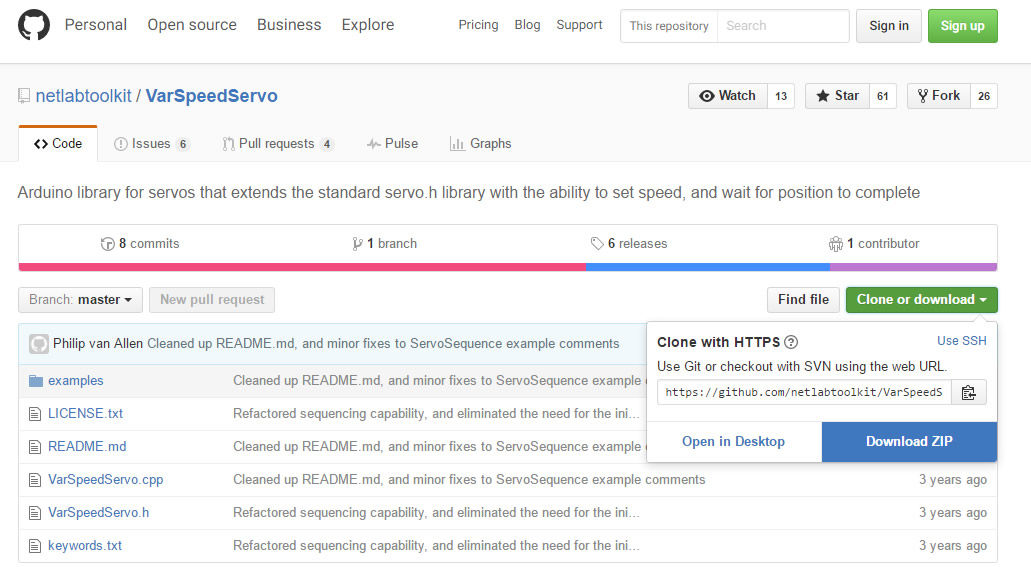
Biblioteca Braço Robótico Arduino
Depois de ter baixado o arquivo, descompacte o mesmo em uma parta denominada “VarSpeedServo” dentro da pasta libraries da IDE do seu Arduino.
Teste Prático do Braço Robótico Arduino
– Para pormos o nosso braço robótico em funcionamento, vamos utilizar um Expansor de entradas e saídas com uma alimentação de aproximadamente 6V conectado diretamente em um Arduino, onde conectaremos os quatro servos e os dois joysticks utilizados em nosso projeto.
Produtos Utilizados no Teste:
– 1 x Arduino UNO;
– 1 x Arduino Sensor Shield – Expansor de Entradas e Saídas V5.0;
– 1 x Braço Robótico MDF com Parafusos e Micro Servo Motor;
– 2 x Joysticks;
– 1 x Fonte de Alimentação Chaveada 6VDC 1A (Para o Sensor Shield);
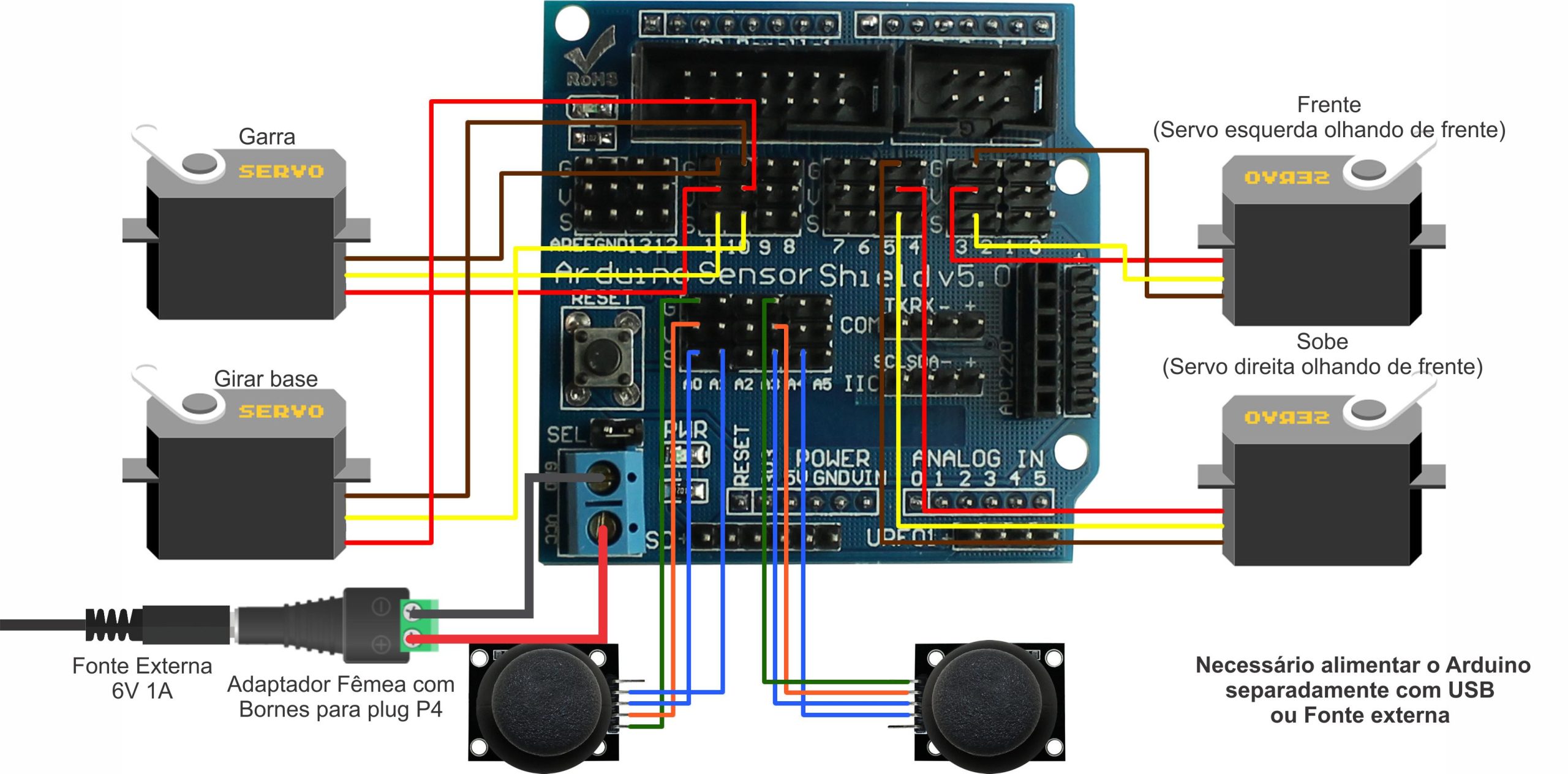
Montagem Física do Projeto
Para fazer a ligação correspondente basta observar com atenção o esquema abaixo e reproduzir em seu projeto a pinagem utilizada.
Funcionamento do Código (Software)
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 |
// Código para teste de funcionamento do Braço Robótico para Arduino; // Controle de movimento realizado por Joysticks; // Usinainfo - www.usinainfo.com.br #include <VarSpeedServo.h> // Inclui a Biblioteca VarSpeedServo.h VarSpeedServo servo_sobe; //Cria objeto para controlar o servo sobe VarSpeedServo servo_frente; //Cria objeto para controlar o servo frente VarSpeedServo servo_garra; //Cria objeto para controlar o servo garra VarSpeedServo servo_corpo; //Cria objeto para controlar o servo corpo int pino_x = A0; //Inicializa o pino analógico ao eixo X do joystick int pino_y = A1; //Inicializa o pino analógico ao eixo Y do joystick int pino_z = A3; //Inicializa o pino analógico ao eixo Z do joystick int pino_w = A4; //Inicializa o pino analógico ao eixo W do joystick int val_x; //Armazena o valor lido pelo eixo X do joystick int val_y; //Armazena o valor lido pelo eixo Y do joystick int val_z; //Armazena o valor lido pelo eixo Z do joystick int val_w; //Armazena o valor lido pelo eixo W do joystick void setup() { servo_sobe.attach(5, 1, 180); //Define que o servo está conectado a porta 5 do Arduino servo_frente.attach(3, 1, 180); //Define que o servo está conectado a porta 3 do Arduino servo_garra.attach(10, 1, 180); //Define que o servo está conectado a porta 10 do Arduino servo_corpo.attach(11, 1, 180); //Define que o servo está conectado a porta 11 do Arduino } void loop() { val_x = analogRead(pino_x); //Recebe o valor lido pelo eixo X do joystick val_x = map(val_x, 0, 1023, 1, 180); //Converte o valor lido para um valor em graus (1 a 180º) servo_sobe.slowmove(val_x, 60); //Movimenta o servo até a posição definida pelo eixo X val_y = analogRead(pino_y); //Recebe o valor lido pelo eixo Y do joystick val_y = map(val_y, 0, 1023, 1, 180); //Converte o valor lido para um valor em graus (1 a 180º) servo_frente.slowmove(val_y, 60); //Movimenta o servo até a posição definida pelo eixo Y val_z = analogRead(pino_z); //Recebe o valor lido pelo eixo Z do joystick val_z = map(val_z, 0, 1023, 1, 180); //Converte o valor lido para um valor em graus (1 a 180º) servo_garra.slowmove(val_z, 60); //Movimenta o servo até a posição definida pelo eixo Z val_w = analogRead(pino_w); //Recebe o valor lido pelo eixo W do joystick val_w = map(val_w, 0, 1023, 1, 180); //Converte o valor lido para um valor em graus (1 a 180º) servo_corpo.slowmove(val_w, 60); //Movimenta o servo até a posição definida pelo eixo W delay(30); } |
Conclusão
O Braço Robótico Arduino é um produto de grande funcionalidade que pode ser aplicado nos mais diversificados projetos, no entanto, quando utilizado junto de um potenciômetro deve-se ter mais atenção e evitar movimentos bruscos devido à “delay” de comunicação, o que pode acarretar na falha dos movimentos do servo. Quanto à utilização do joystick, vale ressaltar que assim como o próprio, o Braço também volta ao seu estado inicial quando em repouso, ou seja, não fixa sua localização e acompanha todos os movimentos reproduzidos através do joystick.
Conheça toda linha Arduino e Acessórios no nosso site da UsinaInfo.



desculpe a pergunta,mas onde vai os potenciômetros nesse projeto? não visualizei ele no vídeo, somente no vídeo que mostra o teste do servo.
Olá Denilson, o projeto foi atualizado e retiramos os potenciômetros.
Qualquer dúvida estamos a disposição
Att Equipe Usinainfo
Boa tarde gostaria de ter mais detalhes sobre as conexões da duas placas a alimentação só vai na placa Arduino Sensor Shield , vc fez a conexão das duas placas
Bom Dia Cleber! É necessária a alimentação de ambos os dispositivos, o Arduino para a interpretação dos dados e o Sensor Shield para a alimentação dos motores.
Olá, gostaria de adquirir esse kit BRAÇO ROBÓTICO PARA ARDUINO, mas onde consigo a lista completa de componentes que preciso comprar?
Bom dia Alexandre, no artigo acima tem a listagem de todos os produtos utilizados.
Segue link do Kit Braço Robótico: http://www.usinainfo.com.br/mini-bracos-roboticos/braco-robotico-em-mdf-para-arduino-com-4-micro-servos-motores-sg90-e-parafusos-manual-de-montagem-3405.html
Att Equipe Usinainfo
O meu eu conseguir fazer, mas do nada um joystick parou, alguém responde por favor urgente?
Bom Dia Valber! Infelizmente não tem como saber exatamente o que aconteceu, verifique se as conexões se estão corretas e se o problema está no Joystick ou até mesmo no servo que este controla. Verifique se o aperto dos parafusos não está muito forte e se o braço consegue deslocar-se sem problema.
O código está pronto para uso ou tem que adicionar mais alguma coisa ?
Olá, sim o código esta pronto para uso.
Att Equipe Usinainfo
Esse pino do joystick que não está conectado é o SW ?
Sim, é o SW.
Att Equipe Usinainfo
O que está alimentando os servos motores ?
Bom dia, para complementarmos a corrente necessária para o funcionamento dos servos, utilizamos uma fonte de bancada.
Att Equipe Usinainfo
Boa noite, a alimentação poder ser feita por uma fonte de 9V – 1A? E a ligação é feita no Arduíno ou na outra placa?
Olá, devido as especificações do servo motor utilizado, o recomendado é a utilização de uma fonte de alimentação 6V 1A.
Boa noite, a alimentação esta sendo feita pelo Arduino, ou pela outra placa? E esta dando um erro na compilação do meu arduino, segue erro ”
C:\Users\Carlos.Bueno\Desktop\Bra_o_teste\Bra_o_teste.ino:5:66: fatal error: VarSpeedServo.h: No such file or directory
#include // Inclui a Biblioteca VarSpeedServo.h
compilation terminated.
exit status 1
Erro compilando para a placa Arduino/Genuino Uno”
Bom dia, para garantir as funcionalidades de todos os Servos e do Arduino, utilizamos duas alimentações independentes, uma alimentação para o Arduino e outra para os Servos através do Shield.
Quanto ao erro que está ocorrendo, é devido a um problema com a biblioteca necessária para o funcionamento do código.
Olá, eu montei o braço perfeitamente, fiz as ligações elétricas e utilizei a programação que está acima. Só que o braço fica se mexendo bem fraco e os Joystick nem manda comando, o que pode ser , só utilizei alimentação do USB.
Olá Carolina, possivelmente é falta de energia, pois a corrente do USB é de no máximo 250mA.
O recomendado é utilizar alimentação externa.
Att Equipe Usinainfo
Olá Carolina, possivelmente é falta de energia, pois a corrente do USB é de no máximo 250m,
o recomendado é utilizar alimentação externa.
Att Equipe Usinainfo
o meu esta dando o seguinte erro Arduino: 1.8.4 Hourly Build 2017/08/10 11:33 (Windows 7), Placa:”Arduino/Genuino Uno”
C:\Users\NATAN\AppData\Local\Temp\arduino_modified_sketch_972105\ISRBlink.pde:1:66: fatal error: VarSpeedServo.h: No such file or directory
#include // Inclui a Biblioteca VarSpeedServo.h
^
compilation terminated.
exit status 1
Erro compilando para a placa Arduino/Genuino Uno
Este relatório teria mais informações com
“Mostrar a saida detalhada durante a compilação”
opção pode ser ativada em “Arquivo -> Preferências”
O que eu faço ?????
Bom dia Natan!
Pelo que vejo o código não está conseguindo encontrar a biblioteca VarSpeedServo.h dentro da libraries.
Para isto basta seguir os passos especificados no transcorrer deste mesmo artigo, na área que falamos do GitHub.
Qualquer duvida estamos a disposição.
Att Equipe UsinaInfo
Esse projeto funciona com programação? Ou só com os joystick??
Queria comprar só o arduíno e a shild,tem como adaptar um Bluetooth para controlar pelo Cell??
Boa tarde!
Sim, este projeto necessita de uma programação para realizar a leitura do joystick e movimentar os servos motores.
Possivelmente tenha como controlar pelo celular, vai depender do aplicativo utilizado e da programação executada.
Mas ele funciona sem os joystick?? Só com a programação??
Bom dia!
Caso seja devidamente programado ele pode ser utilizado sem Joystick não há problema algum.
Att Equipe UsinaInfo
amigo na hora de compilar o código ele da erro segue erro
Arduino: 1.8.4 (Windows 8.1), Placa:”Arduino/Genuino Uno”
O sketch usa 2782 bytes (8%) de espaço de armazenamento para programas. O máximo são 32256 bytes.
Variáveis globais usam 143 bytes (6%) de memória dinâmica, deixando 1905 bytes para variáveis locais. O máximo são 2048 bytes.
avrdude: ser_open(): can’t open device “\\.\COM1”: O sistema não pode encontrar o arquivo especificado.
Problema ao carregar para a placa. Veja http://www.arduino.cc/en/Guide/Troubleshooting#upload para sugestões.
Biblioteca inválida encontrada em C:\Users\jean\Documents\Arduino\libraries\Downloads: C:\Users\jean\Documents\Arduino\libraries\Downloads
Biblioteca inválida encontrada em C:\Users\jean\Documents\Arduino\libraries\Downloads: C:\Users\jean\Documents\Arduino\libraries\Downloads
Este relatório teria mais informações com
“Mostrar a saida detalhada durante a compilação”
opção pode ser ativada em “Arquivo -> Preferências”
Bom dia!
Ao que pude perceber você está com dois problemas, inicialmente o seu programa não está se conectando á porta COM específica do seu Arduino, tente alterar a porta COM. Maiores informações sobre este processo você pode encontrar em nosso artigo “COMO GRAVAR BOOTLOADER COM SHIELD AVR ISP E ARDUINO”, clicando aqui http://www.usinainfo.com.br/blog/como-gravar-bootloader-com-shield-avr-isp-e-arduino/ .
Quanto ao segundo problema, existe uma biblioteca que está impedindo a utilização do referente código, tente entrar no caminho C:\Users\jean\Documents\Arduino\libraries e excluir a pasta “Downloads” para verificar se resolverá o problema. Caso desejar, recomendamos que crie uma cópia em outro lugar do referente arquivo para que não perca o mesmo caso necessite dele em projetos futuros.
Att Equipe UsinaInfo
Boa tarde, para usar a alimentação externa, tem que deixar ou retirar o jumper? não consegui ver onde é alimentado, se é na shield ou no arduino? Posso colocar a alimentação externa de 6v. Também ligo o arduino na alimetação?
Devido ao consumo de ambos os equipamentos, o recomendado é a utilização de uma fonte externa de aproximadamente 6V 1A para o shield que alimenta os servos e outra alimentação para o Arduino que pode ser via USB ou através de fontes de alimentação.
OLÁ
Fiz a todo o processo de extrair o arquivo na pasta libraries e infelizmente está dando esse erro, poderiam me ajudar ?
Arduino: 1.8.5 (Windows 10), Placa:”Arduino/Genuino Uno”
C:\Users\ESK\Documents\Arduino\sketch_nov18d\sketch_nov18d.ino:1:66: fatal error: VarSpeedServo.h: No such file or directory
#include // Inclui a Biblioteca VarSpeedServo.h
^
compilation terminated.
exit status 1
Erro compilando para a placa Arduino/Genuino Uno
Este relatório teria mais informações com
“Mostrar a saida detalhada durante a compilação”
opção pode ser ativada em “Arquivo -> Preferências”
Bom dia!
O que ocorre, é que a sua biblioteca VarSpeedServo.h não foi devidamente instalada junto á pasta libraries do Arduino, verifique novamente o processo e tente outra vez. Vale lembrar que a pasta onde fica o arquivo .h preferencialmente deve conter o mesmo nome do arquivo, neste caso “VarSpeedServo”.
Boa tarde! Os motores possuem encoder? Para saber a posição do braço robótico (ângulos das juntas)
Grato!
Bom dia Gabriel.
O braço utiliza-se de servos motores para seu funcionamento, ou seja, possuem sua posição pré determinada pelo Arduino, não possui encoders para identificação de posição.
Att Equipe UsinaInfo
Tem como utilizar um controle do PS2 com fio neste projeto do braço robótico.
Bom dia!
É possível realizar a adaptação de um controle de PS2 em projetos eletrônicos com Arduino, vai depender somente da adaptação que irá realizar junto ao seu projeto.
Boa noite
Toda vez que o arduino é inicializado, o servomotor vai para uma posição com uma certa velocidade
Gostaria de saber como faço para mudar essa posição e como controlo essa velocidade, após posicionar
ele assume a velocidade programada no arduino
Boa tarde!
Para solucionar o seu problema, acredito que a melhor forma é a inclusão da variável servo.write(ângulo) ao seu projeto, dê uma olhada e verifique a adaptação da mesma ao seu código.
Boa tarde,
ao iniciar o projeto do braço robótico, notei que existe um erro que deve ter passado despercebido.
Ao atribuir as funções:
VarSpeedServo servo_sobe; //Cria objeto para controlar o servo sobe
VarSpeedServo servo_frente; //Cria objeto para controlar o servo frente
Vocês atribuíram subir duas vezes, fazendo com que a função frente não existisse:
void loop() {
val_x = analogRead(pino_x); //Recebe o valor lido pelo eixo X do joystick
val_x = map(val_x, 0, 1023, 1, 180); //Converte o valor lido para um valor em graus (1 a 180º)
servo_sobe.slowmove(val_x, 60); //Movimenta o servo até a posição definida pelo eixo X
val_y = analogRead(pino_y); //Recebe o valor lido pelo eixo Y do joystick
val_y = map(val_y, 0, 1023, 1, 180); //Converte o valor lido para um valor em graus (1 a 180º)
servo_sobe.slowmove(val_y, 60); //Movimenta o servo até a posição definida pelo eixo Y
Mudei o “sobe” da última linha para o “frente”e o braço funcionou conforme o vídeo mostrado.
Abraços!
Olá Celso!
Pedimos desculpas pelo equivoco e agradecemos pela dica, realmente deixamos passar esta variável de forma incorreta durante o desenvolvimento do artigo, já corrigimos o erro e o código está correto novamente.
Não estou conseguindo baixar a biblioteca , pode me ajudar por favor!!
Bom Dia Isaque! Segue link da biblioteca para download: https://github.com/netlabtoolkit/VarSpeedServo
Equipe Usinainfo
Meu braço robotico estou alimentando somente pela porta usb do computador no arduino. Quando faço ligação dos servos na shield principalmente o base gira sozinho. O que estou fazendo de errado.
Posso desenvolver esse projeto utilizando Arduino Mega ou só o UNO ? A placa de expansão shield descrita serve tbm no Arduino Mega ? Obrigado amigo.
Olá Gustavo!
Pode utilizar tanto o Arduino UNO quanto o Mega para desenvolver o referente projeto, vale observar somente o encaixe do Shield com o Mega na hora da instalação e as devidas alterações junto à IDE Arduino.
Este braço pode ser controlado com os modulos de radio frequencia de 433mhz ?
Bom dia!
É possível desenvolver um projeto que utilize o Braço controlado através de um módulo RF, basta desenvolver um código e esquema compatível.
olá! quando instalo o código os servos motores se movimentam sozinhos ,não consigo controlar já chequei e todos os pidos estão na posição certa oque ode ser?
Olá João, existe a possibilidade de estar ocorrendo algum problema com a alimentação que está sendo fornecida para o seu sistema, isto, devido ao fato de ter uma corrente muito baixa, caso não esteja utilizando uma fonte de alimentação externa somente para os motores.
oi! o braço se movimenta sozinho, ja chequei os pinos etc e nenhuma alteração ,sabem o problema?
Olá, você está utilizando um sistema de alimentação adicional de 6V e aproximadamente 1A? Estes movimentos involuntários podem estar associados à falta de corrente, verifique a alimentação do seu projeto em primeiro lugar.
Ola, gostaria de saber mais a respeito da carcaça do braço, ou seja, das partes de madeira, onde consigo medidas ou modelagem delas?
Olá Arthur!
Infelizmente nosso fornecedor não nos disponibiliza o seu projeto com as referentes especificações das peças utilizadas, trabalhamos somente com a comercialização do produto pronto para uso.
Olá poderiam me enviar um arquivo em PDF com o manual de montagem ?
Olá Gabriel!
Infelizmente não disponibilizamos o arquivo em PDF para Download, o mesmo é encaminhado de forma impressa junto com os pedidos realizados em nosso site.
Bom dia!
sou novo no arduino, baixei o arquivo zip, pra fazer um prototipo para eu aprender mais, mais ao compilar da um erro (exit status 1
Adafruit_Fingerprint.h: No such file or directory) não sei como resolver. vocês poderiam me ajudar?
Olá Jean.
Você não está realizando a inclusão da biblioteca junto ao seu Arduino.
Para isto você deve copiar as bibliotecas utilizadas no seu projeto para dentro da pasta “libraries” em C:\Program Files (x86)\Arduino
Boa noite!
Qual programa vc usou para compilar os codigos?
Olá Fabio!
O programa utilizado foi o próprio software Arduino encontrado através do site arduino.cc
Olá!
Pode me socorrer?
Está dando o seguinte erro:
stray “#”in program
exit status 1
stray “#”in program
Muito Obrigado
Bom dia Mauro!
Realizei os devidos testes com o código disponibilizado e não encontrei erro durante o procedimento, pedimos que verifique o código utilizado se está exatamente igual com o disponibilizado no site e se a biblioteca está instala de forma correta. Dentro da pasta libraries, pode ser viável retirar o excedente “-master” e deixar somente “VarSpeedServo”.
TEM COMO SALVAR OS MOVIMENTOS EM UM CARTAO SD E DEPOIS MANDAR FAZER OS MOVIMENTOS DEPOIS
Olá Aleksander!
Os movimentos do servo motor devem ser descritos no código, se declarados da forma correta o seu acionamento e utilização vão depender das variáreis de controle.
BOM DIA!
O BRAÇO SE MOVIMENTO COM O JOYSTICK MAS NÃO PARA NA POSIÇÃO QUANDO SOLTO O BOTÃO DO JOYSTICK, ELE SEMPRE VOLTA PARA A POSIÇÃO INICIAL.
O QUE PODE ESTAR ACONTECENDO?
Olá Allan!
Nossos projetos são desenvolvidos como exemplo para instigar o desenvolvimento de aptidões, esta é uma característica deste projeto, sempre que o joystick é solto o braço volta para a sua posição inicial. Desenvolva as suas próprias melhorias e treine suas habilidades em programação.
Boa noite.
No meu projeto foi solicitado que eu não utilizasse os joysticks.
De que outra forma eu poderia comandar os servos do robô e consequentemente seus movimentos senão por comandos de joystick?
O conteúdo do site de vcs é ótimo, acompanho sempre.
Obrigado.
Olá Tauan!
Existem outros métodos, você pode utilizar potenciômetros ou até mesmo push botton para variar o sinal analógico e realizar o movimento dos braços. Outra opção é a inclusão de um receptor infravermelho para movimentar o braço através de um controle ou se quiser incrementar ainda mais, é possível utilizar um acelerômetro giroscópio, por exemplo para comandar os movimentos do braço.
o meu está dando esse erro
Arduino: 1.8.4 (Windows 7), Placa:”Arduino/Genuino Mega or Mega 2560, ATmega2560 (Mega 2560)”
C:\Users\user\AppData\Documents\Arduino\sketch_mar20a\sketch_mar20a.ino:6:66: fatal error: VarSpeedServo.h: No such file or directory
#include // Inclui a Biblioteca VarSpeedServo.h
^
compilation terminated.
exit status 1
Erro compilando para a placa Arduino/Genuino Mega or Mega 2560
Este relatório teria mais informações com
“Mostrar a saida detalhada durante a compilação”
opção pode ser ativada em “Arquivo -> Preferências”
Boa tarde Luiz!
Este erro ocorre, pois falta incluir a biblioteca VarSpeedServo.h junto ao Arduino, para isto deve realizar o download descrito no projeto e descompactá-lo junto a pasta libraries existente dentre as pastas do programa Arduino no Disco Local.
Bom dia,
Gostaria de saber se esse braço conseguiria alcançar o chão se estivesse suspenso, pretendo colocá-lo em cima de um carrinho de uns 6-7cm de altura.
Agradeço a atenção
Boa tarde Caíque!
Infelizmente não, o seu limite de posicionamento vertical é perpendicular ao limite de sua base.
Tem como fazer esse mesmo projeto só que com o Controle sem via bluetooth ou com o SMARTPHONE !!!
Boa tarde Bruno!
Sim, este projeto pode ser desenvolvido de diversas outras maneiras, incluindo controle bluetooth assim como fazemos no projeto do Carrinho Bluetooth disponível junto ao blog.
Boa tarde,
Gostaria de saber se é normal um ruído elétrico durante o funcionamento dos servos, estou utilizando uma alimentação de 3.5V para os servos e o arduino está ligado pelo USB.
É possível eu ligar um braço robô com o raspberry pi? Seria possível fazer um tutorial sobre isso?
Boa Tarde Diogo!
É possível utilizá-lo com Raspberry, infelizmente até o momento não desenvolvemos tal procedimento, porém em breve estaremos verificando esta possibilidade. Obrigado pela sugestão.
Não estou conseguindo conectar o joystick, não entendi onde é cada entrada.
Também estou com problemas com a programação, vocês precisam de um tutorial mais explicado. O manual está de péssima qualidade.
Boa Tarde Rodrigo!
A conexão do joystick é bastante simples, ele é constituída de 4 pinos, dois deste são pinos de alimentação (VCC e GND) e os outros dois, são pinos de comunicação e devem ser conectados de maneira individual em uma porta analógica.
Estou com esse erro Arduino: 1.6.9 (Windows 10), Placa:”Arduino/Genuino Uno”
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 4 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0x03
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0x03
Problema ao carregar para a placa. Veja http://www.arduino.cc/en/Guide/Troubleshooting#upload para sugestões.
Este relatório teria mais informações com
“Mostrar a saida detalhada durante a compilação”
opção pode ser ativada em “Arquivo -> Preferências”
Boa Tarde Rodrigo!
Infelizmente este erro ao carregar códigos no Arduino ocorre por erro na comunicação entre o Arduino e o Computador, possivelmente por estar com a placa de destino trocada nas especificações.
Qual a ordem dos servos na figura
Boa Tarde Clayton! O servo conectado na porta 5 trabalha para levantar e baixar o braço, o conectado na porta 3 movimenta-se para frente e para trás, o servo conectado na porta 10 abre e fecha a garra do mesmo e o conectado na porta 11 controla o ângulo de movimentação do corpo do projeto.
Boa tarde,
Gostaria de saber como consigo a matriz de denavit hartenberg deste braço robótico, poderiam me ajudar?
Obrigado
Olá Evandro, tudo bem?
Infelizmente não possuímos essa matriz.
Ja adicionei à biblioteca e quando coloco para carregar fica aparecendo erro para copiar para a placa arduino uno.
O que eu faço?
Bom Dia Daniel! Sem o erro exato, infelizmente não posso assegurar qual o problema, verifique se as bibliotecas estão incluídas, se o Arduino está selecionado corretamente, se a Porta COM corresponde ao equipamento conectado e caso tenha alterado alguma parte do código, verifique também se não existe algum problema de pontuação ou função que esteja com problema.
Olá!
Gostaria de saber como faço para travar a posição que executei no joystick, pois esse formato sempre volta para o ponto de origem.
Desde já agradeço pelo retorno
Bom Dia Anderson! Existem comandos específicos que executam tais funções, neste projeto não absteve-se a esta função, porém é possível ter como base o projeto do nosso parceiro que utiliza uma função que congela a posição do braço só que com um controle diferente, veja: https://www.youtube.com/watch?v=qCsGNC5DMX4
Bom dia. Quero criar um relógio de ponto biométrico para conectar ao PC e mandar informação de ponto via USB em tempo real para uma planilha de Excel. É possível?
Bom Dia Rodrigo! Desenvolvemos um projeto que talvez seja semelhante ao que deseja, verifique através do seguinte link: https://www.usinainfo.com.br/blog/balanca-com-arduino-leonardo-imprimindo-valores-direto-no-excel/
Realizei a compra do braço robótico e apesar do manual de instruções ser bem ruim, consegui montar. Entretanto, apenas o servo da base funciona bem. Os demais servos, incluido o da garra não são capazes de movimentar as peças de madeira. Senti falta da explicação sobre como fixar as hastes do servo. Podem auxiliar?
Boa Tarde Jeeser! Verifique o aperto dos parafusos nas juntas do braço, caso eles estejam muito apertados, infelizmente não o movimento será prejudicado. Caso os servos estevam se deslocando para posições diferentes, realmente pode ser devido a instalação da haste, caso este seja o problema, tente remover a haste e após com o braço em seu limite máximo instalá-la novamente.
Boa noite,
É possível usar apenas uma fonte de 12V para alimentar o Arduino e o shield?
Ficaria o Arduino ligado direto na fonte usando o conector p4 dele, e o shield ligado em um step down conectado na fonte também.
não estou conseguindo o link para baixar o código
Olá Francisco! O código de funcionamento está disponível no corpo do texto, não é necessário download, e para baixar a biblioteca, você irá acessar o seguinte link: https://github.com/netlabtoolkit/VarSpeedServo
Bom dia, o meu funcionou, mas o robô se movimenta desordenadamentecom movimentos bruscos o que pode ser?
Olá Bruno! Pelas minhas experiências com o desenvolvimento do projeto, acredito que o problema esteja na alimentação e falta de corrente, por isto recomentamos duas alimentações isoladas, uma para o Arduino que irá fazer a configuração e controle dos servos e outra que irá através do Shield, fornecer a alimentação com a corrente suficiente para o mesmo.
Copiei o código, fiz a compilação e não deu nenhum erro, porém o braço ficou tremendo e sem controle. Eu estou utilizando uma fonte de 12V-1A para alimentar a shield e o arduino.
Bom dia!
A tensão recomendada para alimentação do shield é de 6V 1A, para o Arduino pode-se utilizar o USB ou outra fonte externa em seu jack P4.
O código ainda funciona hoje em dia? Gostaria de fazer esse projeto mais antes queria saber se eu seguir tudo vai funcionar, porque já Vaz 8 anos que o projeto foi enviado.
Boa tarde Edurado!
Sim este projeto ainda funciona, inclusive ainda realizamos a venda do projeto em nosso site!
Ver Braço Robótico Arduino Completo
Eu estou fazendo o projeto porém, eu estou usando o joystick shield, para conectar ao braço robótico é do mesmo jeito?
o esquema eletrico nao mostra a ligação com o arduino.
Boa tarde!
As ligações são feitas no Expansor de portas, por sua vez o expasor de portas é conectado diretamente ao Arduino, então a conexão do Arduino não aparece, pois é feita pelo encaixe do Expansor com o Arduino como demonstra a imagem abaixo:
https://botland.com.pl/img/art/inne/03725_7.jpg
É preciso uma fonte de alimentação para shield? Em todo escopo do projeto não aparece essa necessidade. Montei tudo, mas o funcionamento não está legal, o braço está fazendo movimentos bruscos.
Boa tarde!
Sim, editamos o artigo e incluímos a fonte adequada.
– 1 x Fonte de Alimentação Chaveada 6VDC 1A (Para o Sensor Shield);
boa tarde, comprei o pacote pelo site de voces, montei, remontei, e denovo montei, e ele primeiramente nao se mexia, apos isso, remontei seguindo o esquema de programação de outro site, e ele começou a se mexer com a luz do pwr do shield piscando, apos isso refiz o esquema e ele parou de piscar mas tambem de se mover, usei o codigo disponibilizado aqui e a programação deu tudo certo, da pra ouvir ele mexendo bem fraquinho, o chatgpt disse ser um problema de energia onde falta amperagem, coisa que nao acredito ser, portanto so me resta pensar que é um problema na montagem, poderia me esclarecer qual servo é qual e onde devo por no shield, desde ja agradeço
Bom dia João,
utilizamos o Servo SG90 neste projeto, é posicionado como na imagem do esquema do projeto. Caso seja alimentação, você já tentou desconectar os outros servos e apenas deixar um deles ligado?
Aliás, a fonte 6V DC que acompanha o kit serve para realizar a ligação direta no sensor shield, na sua entrada de Alimentação Externa.