


Quem já montou um Carrinho Arduino Robótico com certeza se deparou com diversos problemas e barreiras durante o processo de montagem do seu projeto, chassi com perfurações diferentes, parafusos ou espaçadores insuficientes sempre acaba faltando alguma coisa e você tem que sair correndo comprar ou esperar alguns dias pela entrega de sua compra online.
Além dos clássicos problemas de incompatibilidade física, nos deparamos com diversos problemas durante o processo de desenvolvimento que no fim passam por despercebidos e que merecem sua devida atenção, seja na alimentação dos equipamentos ou na compatibilidade existente entre os mesmos.
Para quem deseja desenvolver um Carrinho Arduino, as três opções mais recorrentes são pelo desenvolvimento de carrinhos seguidor de linha através de sistemas de reconhecimento infravermelho, carrinhos independentes com sistema de reconhecimento por sensor ultrassônico e por fim, os carrinhos controláveis através de dispositivos de comando externo.
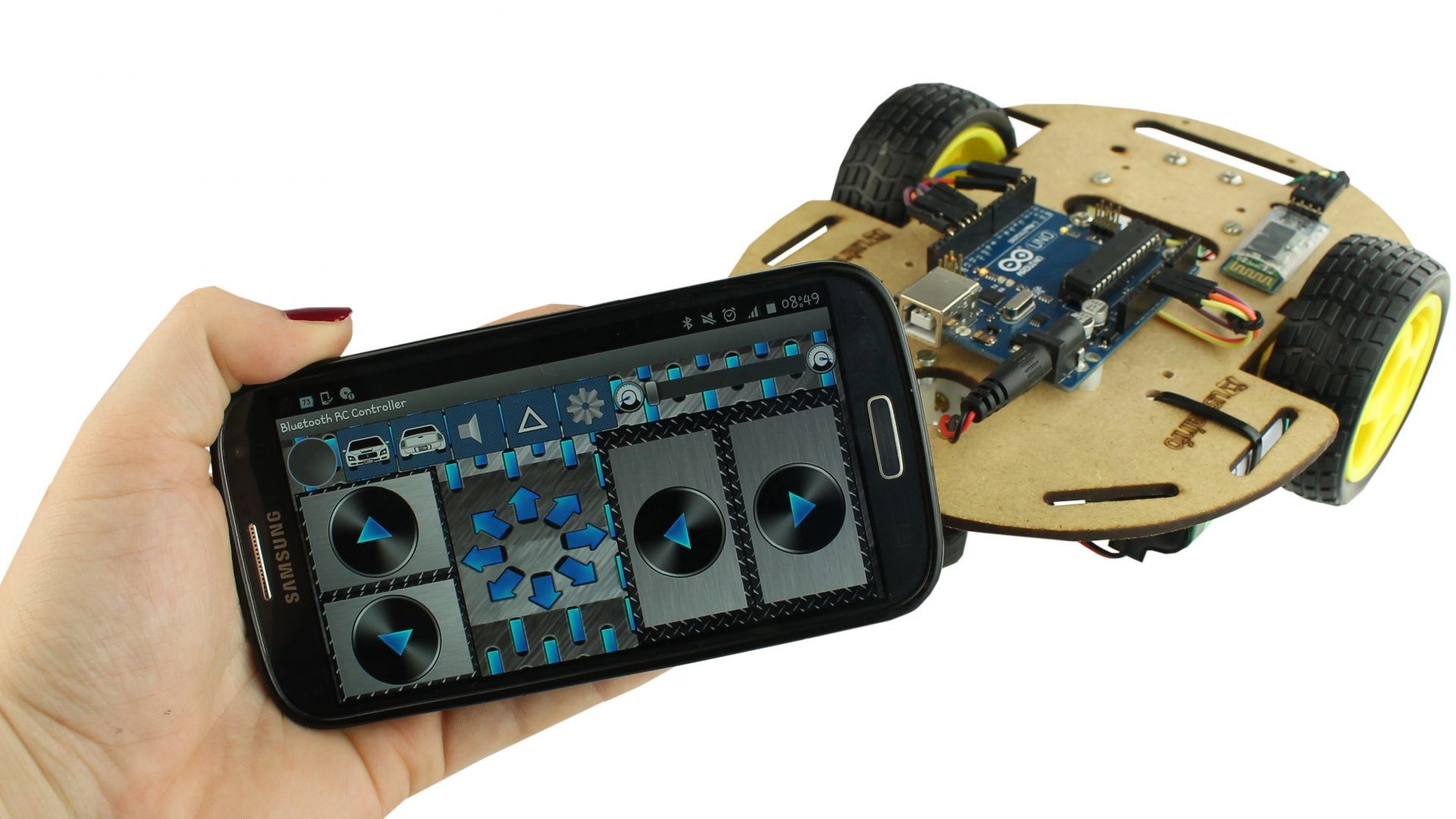
Pensando nisto, desenvolvemos um modelo exclusivo controlado por sistema de comunicação Bluetooth, o qual através de um dispositivo equipado com sistema Android e um aplicativo adequado, consegue realizar todos os comandos necessários para o processo de movimentação do carrinho, necessitando somente de um aplicativo específico para o seu uso, que é o RC Bluetooth Controller encontrado facilmente junto a Play Store.
De forma geral, recomendamos a utilização deste aplicativo devido a fácil interpretação e desenvolvimento do código, o qual não necessita de bibliotecas adicionais e possui comandos específicos fornecidos somente por este aplicativo em especial.
Capaz de executar as mais diversificadas ações como a utilização de faróis frontais e traseiros, buzina, controle de velocidade e acionamento do pisca alerta, este aplicativo ainda possui a capacidade de conciliar comandos com o intuito de aumentar ainda mais a sua mobilidade.
Desenvolver este Carrinho Arduino é um pouco complicado para quem não possui uma boa base em programação e conhecimentos fundamentais sobre a composição das portas padrão do Arduino, isto pois, existem portas com características específicas que podem acabar não atendendo a necessidade de determinados projetos e acabar dando bastante dor de cabeça.
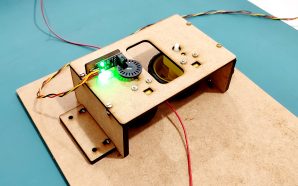
Teste Prático do Carrinho Arduino
De modo geral, a ideia foi desenvolver um Carrinho Arduino que fosse controlado pelo celular e pudesse ser de fácil montagem e utilização, recentemente disponibilizamos este carrinho já montado e pronto para uso em nosso site e agora para quem deseja por a mão na massa e construir seu próprio exemplar, estamos disponibilizando o projeto de desenvolvimento do mesmo.
A quantidade de alguns itens como parafusos, espaçadores e Jumpers vão depender de como será desenvolvido o projeto e o modo utilizado para a fixação e adaptação de cada elemento do projeto no chassi do Carrinho Arduino.
Vale lembrar que este carrinho já possui motores com caixa de redução de 48:1, caracterizado pela sua velocidade, porém caso prefira um carrinho com menor velocidade, mas com maior capacidade de carga, recomendamos a utilização de um motor DC com caixa de redução de 120:1.
Produtos Utilizados no Projeto Arduino Carro Robô
- 1 Carrinho Arduino 2WD em MDF;
- 1 Driver Duplo Ponte H;
- 1 Suporta para Pilha AA – 4 Slot;
- 1 Arduino UNO R3 + Cabo USB;
- 1 Bluetooth HC-05;
- 1 Buzzer;
- 1 Conector de Bateria 9V para P4;
- Pilha AA 1,5V – Kit com 4 Unidades ;
- Bateria 9V Alcalina;
- Barra de pinos 90º 14,5mm;
- Parafuso Metálico M3x10mm;
- Parafuso Metálico M3x6mm;
- Parafuso Plástico M3x5mm;
- Espaçador Plástico M3x6mm;
- Jumpers.
Montagem Física do Projeto (Hardware)
Para realizar a conexão correspondente ao projeto, basta observar com atenção o esquema abaixo e reproduzir em seu projeto a pinagem utilizada, lembrando que esta montagem está diretamente relacionado ao código e qualquer mudança na montagem física deve resultar também em uma mudança junto ao código.
Vale ressaltar algumas informações importantes que devem ser consideradas no processo de montagem do Carrinho Arduino, a principal delas diz respeito á alimentação dos motores que trabalham em conjunto ao Arduino, ou seja, precisam ter um elemento comum que normalmente é utilizado as conexões de aterramento para estabelecer esta relação.
Outro dado importante é quanto à conexão do Módulo Bluetooth que deve ser realizada conectando o pino TX em RX e o pino RX em TX lembrando que, sempre que for realizado o processo de gravação junto ao Arduino, estes pinos de comunicação devem estar desconectados do equipamento.
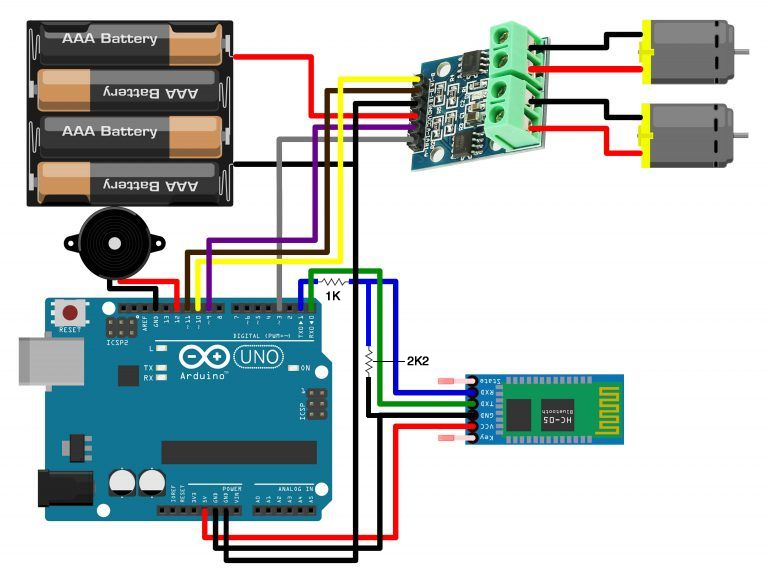
Esquemático Carrinho Arduino Controlado por Bluetooth e Sistema Android
Funcionamento do Programa (Software)
Código de Programação:
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 85 86 87 88 89 90 91 92 93 94 95 96 97 98 99 100 101 102 103 104 105 106 107 108 109 110 111 112 113 114 115 116 117 118 119 120 121 122 123 124 125 126 127 128 129 130 131 132 133 134 135 136 137 138 139 140 141 142 143 144 145 146 147 148 149 150 151 152 153 154 155 156 157 158 159 160 161 162 163 164 |
/* Carro Arduino com controle Bluetooth Código retirado do link abaixo: http://www.instructables.com/id/Arduino-Bluetooth-RC-Car-Android-Controlled/?ALLSTEPS Conclusão e adaptações por Usinainfo: http://www.usinainfo.com.br/ */ // Define os pinos de utilização do Driver L298. const int motorA1 = 9; // Pin 5 of L293. const int motorA2 = 3; // Pin 6 of L293. const int motorB1 = 11; // Pin 10 of L293. const int motorB2 = 10; // Pin 9 of L293. const int buzzer = 12 ; // Define o Pino 13 como pino do Buzzer. const int BTState = 2; // Define o Pino 2 como o pino de comunicação do Bluetooth. // Variáveis Úteis int i = 0; int j = 0; int state_rec; int vSpeed = 200; // Define velocidade padrão 0 < x < 255. char state; void setup() { // Inicializa as portas como entrada e saída. pinMode(motorA1, OUTPUT); pinMode(motorA2, OUTPUT); pinMode(motorB1, OUTPUT); pinMode(motorB2, OUTPUT); pinMode(buzzer, OUTPUT); pinMode(BTState, INPUT); // Inicializa a comunicação serial em 9600 bits. Serial.begin(9600); Serial.println("-- USINAINFO --"); Serial.println("Carrinho Arduino controlado por Smartphone"); } void loop() { // Para o carro quando a conexão com Bluetooth é perdida ou desconectada. if (digitalRead(BTState) == LOW) { state_rec = 'S'; } // Salva os valores da variável 'state' if (Serial.available() > 0) { state_rec = Serial.read(); state = state_rec; // Serial.println(vSpeed); } // Altera a velocidade de acordo com valores especificados. if (state == '0') { vSpeed = 0; } else if (state == '4') { vSpeed = 100; } else if (state == '6') { vSpeed = 155; } else if (state == '7') { vSpeed = 180; } else if (state == '8') { vSpeed = 200; } else if (state == '9') { vSpeed = 230; } else if (state == 'q') { vSpeed = 255; } if (state != 'S') { Serial.println(state); } // Se o estado recebido for igual a 'L', o carro se movimenta para Esquerda. if (state == 'L') { Serial.println(state); analogWrite(motorB1, vSpeed); analogWrite(motorA1, vSpeed); analogWrite(motorA2, 0); analogWrite(motorB2, 0); } else if (state == 'H') { // Se o estado recebido for igual a 'H', o carro se movimenta para Tras Esquerda. Serial.println(state); analogWrite(motorA1, vSpeed); analogWrite(motorA2, 0); analogWrite(motorB1, 100); analogWrite(motorB2, 0); } else if (state == 'G') { // Se o estado recebido for igual a 'G', o carro se movimenta para Frente Esquerda. Serial.println(state); analogWrite(motorA1, 100); analogWrite(motorA2, 0); analogWrite(motorB1, vSpeed); analogWrite(motorB2, 0); } else if (state == 'R') { // Se o estado recebido for igual a 'R', o carro se movimenta para Direita. Serial.println(state); analogWrite(motorA1, 0); analogWrite(motorB1, 0); analogWrite(motorB2, vSpeed); analogWrite(motorA2, vSpeed); } else if (state == 'I') { // Se o estado recebido for igual a 'I', o carro se movimenta para Frente Direita. Serial.println(state); analogWrite(motorA1, 0); analogWrite(motorA2, vSpeed); analogWrite(motorB1, 0); analogWrite(motorB2, 100); } else if (state == 'J') { // Se o estado recebido for igual a 'J', o carro se movimenta para Trás Direita. Serial.println(state); analogWrite(motorA1, 0); analogWrite(motorA2, 100); analogWrite(motorB1, 0); analogWrite(motorB2, vSpeed); } else if (state == 'F') { // Se o estado recebido for igual a 'F', o carro se movimenta para Frente. Serial.println(state); analogWrite(motorA1, 0); analogWrite(motorA2, vSpeed); analogWrite(motorB1, vSpeed); analogWrite(motorB2, 0); } else if (state == 'B') { // Se o estado recebido for igual a 'B', o carro se movimenta para Tras. Serial.println(state); analogWrite(motorA1, vSpeed); analogWrite(motorA2, 0); analogWrite(motorB1, 0); analogWrite(motorB2, vSpeed); } else if (state == 'S') { // Se o estado recebido for igual a 'S', o carro permanece parado. //Serial.println(state); analogWrite(motorA1, 0); analogWrite(motorA2, 0); analogWrite(motorB1, 0); analogWrite(motorB2, 0); } else if (state == 'W') { // Se o estado recebido for iguala 'V', aciona a buzina. tone(buzzer, 1000); } else { Serial.println(state); analogWrite(motorA1, 0); analogWrite(motorA2, 0); analogWrite(motorB1, 0); analogWrite(motorB2, 0); noTone(buzzer); } } |
Logo de saída temos uma informação muito importa que sem ela você não pode dar continuidade à utilização do seu produto, com o intuito de auxiliar o controlador e aumentar ainda mais a segurança de seu equipamento o módulo bluetooth possui uma senha que pode ser facilmente alterada através de um uma programação adequada, mas que como padrão é 1234.
Desenvolvido com um sistema de interação total para o controle de carrinhos, o “RC Bluetooth Controller” é capaz de executar algumas funções extremamente simples, mas que fazem a total diferença quando pensando no projeto como um todo.
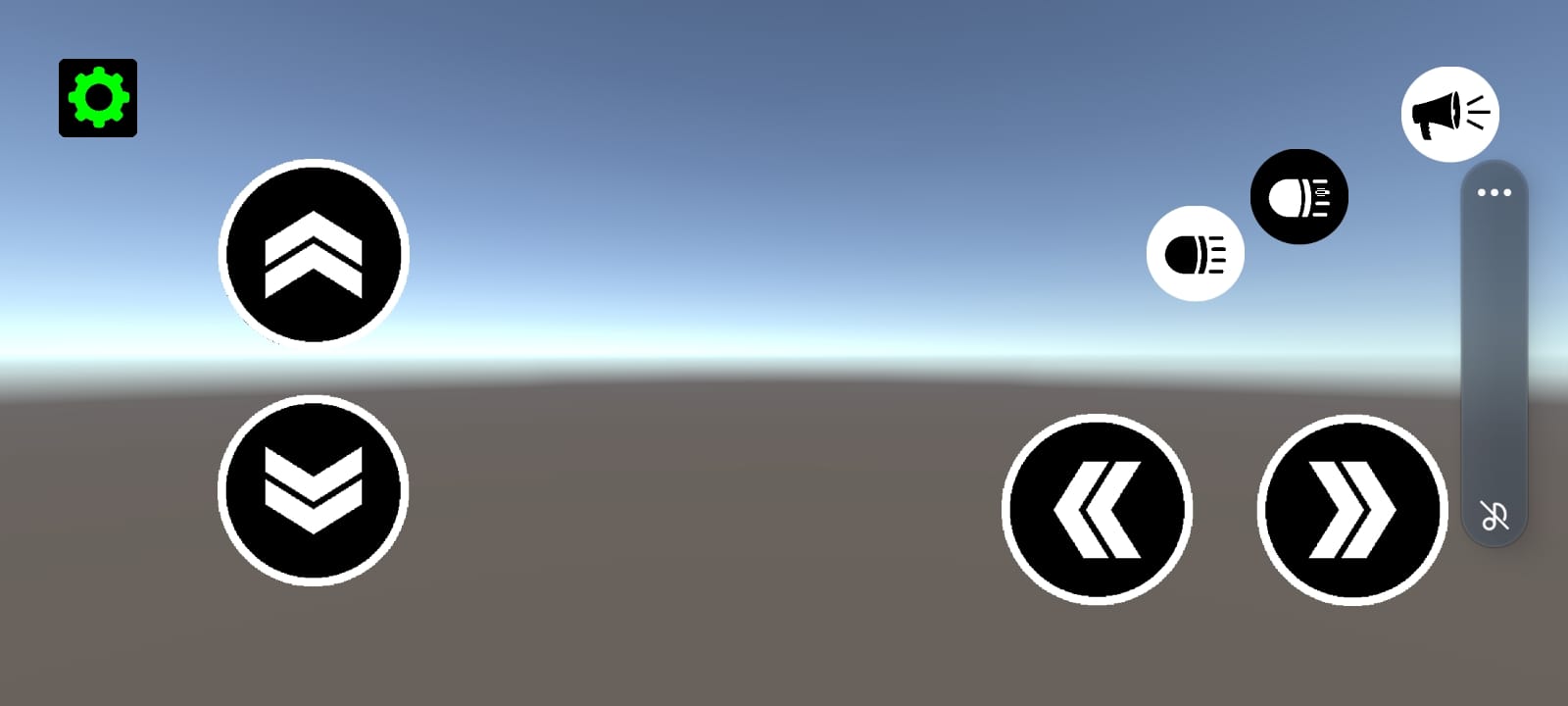
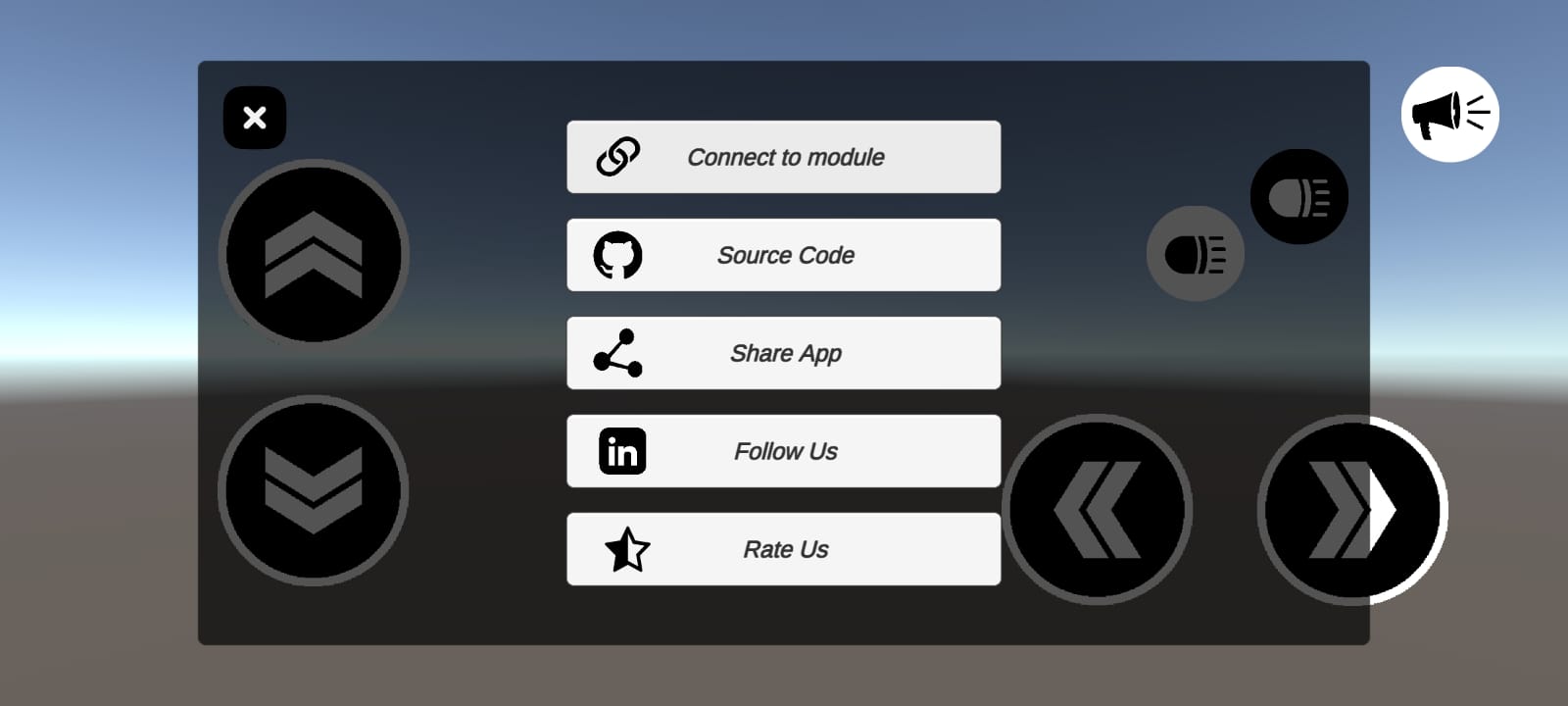
Para conectar o carrinho, é necessário estar com o HC-05 pareado, após é só clicar na engrenagem no canto esquerdo superior, conforme imagem anterior e clicar no primeiro botão “Connect to Module” que ficara na cor verde quando conectado.
De modo geral, o Carrinho Arduino é um produto de fácil desenvolvimento e ainda mais fácil utilização, se seguir todos os passos presente no esquema de ligação não terá erro e só precisará se preocupar em se divertir pilotando este exclusivo produto Usinainfo.
Além de possuir um código simples e de fácil entendimento que não necessita de includes, o projeto do Carrinho Arduino pode ser facilmente adaptado para incluir LEDs atribuídos às sinaleiras e diversos outros equipamentos para complementar o seu carrinho robô.
Conheça toda linha Arduino e Acessórios no nosso site.


Very nice post. I certainly appreciate this website.
I’ve read some excellent stuff here. Definitely price bookmarking for revisiting. I surprise how much effort you place to create this type of great informative site.
Olá usinainfo! Agradeço e parabenizo o projeto!! Preciso de ajuda com um carrinho 4WD, se eu utilizar o mesmo componente e colocar mais um driver duplo pont H para as outras duas rodas, funcionaria ? Estou procurando fazer com componentes mais simples.
Boa tarde!
Sim, a implementação de mais um Drive igual ao utilizado para o controle dos motores é fundamental caso opte por este modelo. Caso esteja pensando em utilizar os mesmos comandos para as rodas de frene e de trás, indico inclusive a utilização de um outro Drive com maior capacidade de corrente e que consiga controlar neste caso, dois motores por canal. Lembramos que qualquer mudança deve ser pensada levando em consideração a corrente e a tensão dos equipamentos utilizados, podendo ser necessários incluir mais pilhas / baterias ou até mesmo algum outro componente ao projeto. Att Equipe UsinaInfo
Olá eu queria saber pq fica d
ando erro quando eu vou enviar para o arduino fica dando erro ja pesquesei mais nao consigo resolver esse problema vc pode me ajudar ficaria muito grato a ter sua ajuda
Olá Leonardo!
Este é um problema que ocorre devido ao conflito dos pinos de comunicação TX e RX, sempre que for gravar o código junto ao computador é necessário remover os correspondentes jumper e após a gravação conectá-los novamente.
Olá, parabéns pelo tópico.
Excelente trabalho, funcionou de primeira. Eu não tenho conhecimento nenhum desse tipo de projeto, sou iniciante e ja funcionou de primeira.
Agora gostaria de saber como adicionar por exemplo um sensor de luminosidade, para que o carrinho também acompanhe uma luz, sendo alternado para direcionamento manual ou seguindo uma luz. Desde já agradeço e aguardo o retorno.
Boa tarde Leonardo!
Este procedimento pode ser desenvolvido, porém irá necessitar de uma alteração tanto no esquema elétrico quando no código do seu carrinho, porém infelizmente não temos nenhum projeto como este disponível no momento.
Como ficaria a ligação usando um driver l293d? Montei um carrinho usando esse tutorial mas não estou conseguindo fazer funcionar.
Boa tarde! A utilização vai depender do driver que está utilizando, Shield ou módulo, vale lembrar que se está utilizando um módulo com alimentação externa precisa lembrar de estabelecer um negativo comum entre os elementos do seu projeto. Caso optou por não incluir algum tipo de alimentação externa vale lembrar que existe a possibilidade de não estar havendo corrente suficiente para alimentar seu equipamento Arduino e os Motores.
Att Equipe UsinaInfo
Olá.
Estou montando um projeto com dois Shields L298, pois preciso de três motores, e gostaria de saber como fica a alimentação do Arduino, já que percebi que na montagem a bateria está ligada somente ao Shield. Tentei adequar essa montagem ao meu modelo mas não funcionou. E tb quais seriam as modificações necessárias no sketch, já que usarei a função da luz dianteira para o terceiro motor que ficará em rotação constante.
Obrigado desde já.
Boa tarde! Você precisa ter em mente inicialmente que a tensão de alimentação Arduino é de aproximadamente 9V e os motores necessitam de uma alimentação de 6V, ou seja, para alimentar o Arduino você pode utilizar uma bateria 9V, quanto aos motores eles necessitam de uma alimentação externa para fornecer a corrente necessária de funcionamento, esta tensão de entrada pode variar de acordo com o Shield utilizado.
Olá UsinaInfo,
Primeiramente parabéns pelo projeto, serviu como uma ótima base para o meu.
Gostaria de tirar uma dúvida, ao invés do L293, optei por um L298. Como preciso de três motores, estou usando dois, gostaria de saber como funciona a alimentação do Arduino, pois percebi que segundo a instalação, ele não possui uma alimentação direta. O meu só funciona quando conectado no notebbok.
Agradeço desde já.
Boa tarde!
Nos esquemas desenvolvidos e disponibilizados junto aos projetos de Arduino não costumamos apresentar a forma de alimentação que varia de acordo com o cliente, pode ser através do cabo USB que é o caso que está utilizando, ou com fonte de alimentação através do conector P4, estas fontes de alimentação podem ser desde transformadores comuns conectados à tomadas como baterias 9V, por exemplo, que supram a necessidade do seu projeto.
Qual app posso usar num projeto de esteira? pois não há articulação como nos carros, esse app dispõe de botões para articulação de rodas dianteiras, no meu caso usarei em robô esteira.
Boa tarde! Caso deseje, pode utilizar este mesmo APP, basta alterar o código para que supra suas necessidades, cada botão do APP possui um caractere específico que quando reconhecido pelo Arduino executa uma determinada ação, com isto você já consegue desenvolver um projeto do seu modo.
Olá, Bom dia! Estou fazendo o mesmo projeto, porém usando um Lm298N, porém tenho dúvidas de como a velocidade será controlada por essa ponte H.
Bom dia!
A velocidade é controlada através dos pinos PWM do seu Arduino, por isto vale cuidar este detalhe na hora de realizar o seu projeto.
Bom dia, estou fazendo esse projeto com base nas informações desse site e estou tendo alguns problemas. Não conseguir achar na minha cidade esse shield que controla os motores, então optei pelo Lm298 (vi outros projetos que exercem a mesma função usando esse shield). Estou seguindo corretamente a montagem e usanndo o mesmo app de Bluetooth, porém eu só consigo acionar a buzina com o buzzer. Os movimentos do carrinho quando eu dou o comando não acontecem absolutamente nada. Gostaria de uma dica para qual seria o erro que estou cometendo, e por favor o mais rápido possível
Muito obrigado pela atenção
Bom dia João Pedro, você incluiu alimentação para os motores separada do Arduino para suprir a carga dos mesmos? Utilizou o pino negativo comum interligando o Arduino, o módulo e o porta baterias? Utilizou os mesmos pinos PWM? Verificou o funcionamento individualizado de cada um dos equipamentos para verificar se algum deles não demonstra algum tipo de defeito?
Boa tarde Usinainfo. Parabéns pelo projeto! Estou abdicando dele mas eu optei por usar a ponte H L298.. o buzzer respondeu aos comandos do celular (bluetooth), porém, os motores não estão sendo acionados.. estou usando uma fonte de 9v no arduino APENAS,precisaria de uma voltagem maiores os motores, ou a programação vai mudar para a ponte H escolhida ?
obrigado, Boa tarde.
Bom dia João Vitor, é necessária a utilização de uma fonte externa para os motores, somente a alimentação do Arduino não consegue dar conta de executar suas funções e alimentar os motores, fazendo com que os mesmos não executem suas funções normalmente.
Tentei montar o carrinho conforme as instruções, porém quando ligo os componentes e coloco o código fornecido no arduino ele começa girar as rodas, mas os comandos do bluetooth não funciona. Poderia me ajudar nesta questão por favor?
Boa tarde!
Verifique as conexões dos seus pinos para constatar se não possuem pinos desconectados, comumente este problema ocorre devido ao fato de um dos polos do motor estar desconectado e não estar identificando o valor do pino Arduino.
Att Equipe UsinaInfo
TAMBÉM LIGUEI O CIRCUITO DA MANEIRA APRESENTADA NO DESENHO E ACABEI DE DESCOBRIR QUE QUEIMEI MEU MODULO BLUETOOTH, PESQUISANDO DEPOIS VI QUE É NECESSÁRIO COLOCAR UM DIVISOR DE TENSÃO NO PINO RX DO MODULO BLUETOOTH PARA EVITAR DANIFICAR A PLACA JÁ QUE AS PORTAS DIGITAIS DO ARDUINO ENVIAM 5V MAS O MODULO TRABALHA COM 3,3V.
OU SEJA, DISPONIBILIZARAM UM CIRCUITO COM AS LIGAÇÕES INCORRETAS E SAI NO PREJUIZO PERDENDO MEU MODULO BLUETOOTH QUE HAVIA ACABADO DE ADQUIRIR PARA O PROJETO
Bom dia Emanuel!
Realmente o uso contínuo do módulo Bluetooth pode acabar ocasionando danos ao mesmo, porém a simples utilização do mesmo no referente esquema de ligação apresentado não é o suficiente para danificá-lo. Nossos projetos são desenvolvidos de forma à auxiliar os que desejam criar o seu projeto e não sabem por onde começar, mas fica a cargo de cada um os ajustes que acharem necessários.
Boa noite, segui o projeto com um chassis próprio feiro com pvc e micromotores polulu, que trabalham com 6v à 12v.
Segui a programação e não tive nenhum problema com o carrinho. Funciona perfeitamente. Estou usando um pac com 3 bateiras de
LiOn de 3,7 v cada alimentando o Arduíno Uno e o Lm 298. Parabéns pelo projeto.
Que bom Rogério!
olá! posso usar motorzinho de dvd nesse carrinho? achei meio caro os motores com redutor ;-;
Boa tarde!
As adaptações ficam por conta de quem está desenvolvendo o projeto, até o momento não testamos com motores de DVD, existem diversos fatores como velocidade e variação de PWM que podem influenciar no seu projeto com outro motor, verifique a possibilidade e após testar se quiser compartilhar sua experiência conosco estamos ansiosos para saber o resultado do seu projeto.
como vou conectar a pilha no gnd e no relay module ao mesmo tempo?
Boa tarde!
Quando desenvolvemos o referente projeto, utilizamos o fio que sai do porta pilhas e soldamos duas metades de jumper Premium 20cm junto ao mesmo, deste modo conectamos um jumper ao módulo drive e outra no GND do Arduino.
Amigo o modulo bluetooth classe 1 Rn41 serve no lugar do Hc06?
Olá!
Para garantir a total compatibilidade e evitar alterações no projeto é recomendada a utilização do Módulo Bluetooth HC-06.
ola quero fazer o mesmo com 4 motores e o drive ld293 o que eu tenho que fazer com o codigo para funcionar?
Bom dia Paulo!
Você deverá incluir novas variáveis correspondentes aos motores e verificar quanto as velocidades e movimentos que cada roda irá executar.
Boa Noite, esta dando o seguinte erro e sou iniciante como devo prosseguir:
Arduino: 1.8.5 (Windows 7), Placa:”Arduino/Genuino Uno”
O sketch usa 3458 bytes (10%) de espaço de armazenamento para programas. O máximo são 32256 bytes.
Variáveis globais usam 214 bytes (10%) de memória dinâmica, deixando 1834 bytes para variáveis locais. O máximo são 2048 bytes.
avrdude: ser_open(): can’t open device “\\.\COM1”: O sistema não pode encontrar o arquivo especificado.
Problema ao carregar para a placa. Veja http://www.arduino.cc/en/Guide/Troubleshooting#upload para sugestões.
Este relatório teria mais informações com
“Mostrar a saida detalhada durante a compilação”
opção pode ser ativada em “Arquivo -> Preferências”
Olá! Neste caso, se não foi selecionada a COM correspondente ao Arduino que está utilizando banta selecioná-la, porém caso não exista a opção correspondente, será necessário a instalação de um drive compatível com o equipamento Arduino utilizado.
Olá, estou tendo o seguinte com o código: Arduino: 1.8.5 (Windows 8.1), Board: “Arduino/Genuino Uno”
c:\program files\arduino-1.8.5\hardware\tools\avr\bin\../lib/gcc/avr/4.9.2/../../../../avr/bin/ar.exe: unable to rename ‘core\core.a’; reason: File exists
exit status 1
Error compiling for board Arduino/Genuino Uno.
This report would have more information with
“Show verbose output during compilation”
option enabled in File -> Preferences.
Como eu posso resolver? Será que alguém pode me ajudar?
Bom dia Davi!
Até o momento não tive o referente problema, pesquisando em alguns canais de suporte da empresa Arduino, encontrei pessoas que relataram o referente problema e solucionaram ora desativando o antivírus (não sei se é uma opção válida, mas vale testar), ora executando o Arduino como Administrador, para autorizar a alteração em pastas e arquivos do referente computador.
Ola
estou com problema com o meu carrinho
a buzina funciona sem nenhum problema mas os moters nao querem funcionar
voces tem alguma dica para poder me ajudar?
Olá Fellipe!
Verifique os encaixes do fio do motor junto ao Drive e se as pilhas possuem energia suficiente para os referentes motores.
Obs.: Lembrou de interligar o negativo da bateria com o negativo do drive que vai para o Arduino?
Boa noite!
Parabéns pelo projeto desenvolvido!
Estou tentando utilizar os módulos bluetooh e driver ponte H juntamente com o Carrinho Arduino Mark / Tanque tipo Lagarta 2WD. Ocorre que quando eu aciono o botão liga e desliga do compartimento de pilhas do referido carrinho o drive energiza uma das saídas e aciona o motor correspondente, mesmo o arduino estando desligado. O código alterei para apenas ir para frente e para trás. Se puderem me ajudar, já agradeço.
Olá Nazareno!
Como o código foi alterado, pode ser que alguma das variáveis tenham entrado em conflito e estejam ocasionando o referente problema, vale verificar o código bem certinho para eliminar a possibilidade de qualquer problema, mas vale verificar a ligação do junto ao drive e os pinos utilizados para comunicação se estão corretos e conectados nos correspondentes locais do drive.
Olá, estou com um problema ao fazer upload do código na placa arduino uno r3smd, tentei várias vezes solucionar esse erro de várias formas, sem sucesso, como resolver??
Aguardo resposta
Segue mensagem de erro:
Arduino: 1.8.5 (Windows 7), Placa:”Arduino/Genuino Uno”
O sketch usa 3458 bytes (10%) de espaço de armazenamento para programas. O máximo são 32256 bytes.
Variáveis globais usam 214 bytes (10%) de memória dinâmica, deixando 1834 bytes para variáveis locais. O máximo são 2048 bytes.
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 1 of 10: not in sync: resp=0xfe
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 2 of 10: not in sync: resp=0xfe
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 3 of 10: not in sync: resp=0xfe
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 4 of 10: not in sync: resp=0xfe
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 5 of 10: not in sync: resp=0xfe
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 6 of 10: not in sync: resp=0xfe
avrdude: stk500_recv(): programmer is not responding
Problema ao carregar para a placa. Veja http://www.arduino.cc/en/Guide/Troubleshooting#upload para sugestões.
avrdude: stk500_getsync() attempt 7 of 10: not in sync: resp=0xfe
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 8 of 10: not in sync: resp=0xfe
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 9 of 10: not in sync: resp=0xfe
avrdude: stk500_recv(): programmer is not responding
avrdude: stk500_getsync() attempt 10 of 10: not in sync: resp=0xfe
Este relatório teria mais informações com
“Mostrar a saida detalhada durante a compilação”
opção pode ser ativada em “Arquivo -> Preferências”
Olá Mailson!
Ao que parece, você está tentando gravar o código com os pinos TX e RX do bluetooth conectados ao Arduino. Para carregar o código junto ao Arduino estes pinos devem estar desconectados, posteriormente quando o código já estar gravado no seu microcontrolador basta conectá-los novamente.
como resolver : avrdude: ser_open(): can’t open device “\\.\COM8”: Não é possível alcançar o local da rede. Para obter informações sobre solução de problemas de rede, consulte a Ajuda do Windows.
presico de ajudar urgente tenho feira amanha !!!!
Olá Mauricio!
Você não está selecionado a porta COM correta que corresponde ao Arduino utilizado.
Altere a porta COM que o problema será resolvido.
posso usar o hc-06 no lugar do HC-05?
Boa Tarde denes! Sim, ambos os modelos de bluetooth devem funcionar com este projeto.
Bom a Noite
vocês vendem o kit completo ?
se sim como faço?
Olá Ederson, temos o Carrinho Pronto para uso, confira o produto no link a seguir: https://www.usinainfo.com.br/kit-robotica/carrinho-arduino-200rpm-controlado-por-smartphone-montado-e-pronto-para-uso-parland-3757.html
aonde devo compilar o programa ?
Olá ENG!
Para compilar o código você deve utilizar o Software Arduino disponível em arduino.cc
Ola, boa noite.
Estou com algumas duvida, o modulo bluetooth é o HC-05 ou HC-06?
Outra duvida é em questão aos motores, eu estou montando um carrinho de criança igual ao que se costuma ver em shopping, entao teoricamente teria que ter dois motores. Voces conseguiriam me ajudar nessas questoes??
parabens pelo projeto.
Olá Breno!
Para o desenvolvimento deste projeto utilizamos o Módulo Bluetooth HC-05, quanto aos motores, o projeto possui dois motores com roda e uma roda boba na parte frontal.
ATENÇÃO: O esquema está errado! o pino Rx trabalha com nível lógico de 3.3V, do jeito que está, sem divisor de tensão o módulo HC-05 irá queimar!
Bom dia Bruno!
Esta é uma informação verdadeira, o projeto não está errado, o funcionamento do módulo bluetooth pode ser desenvolvido aplicando-se 5V sem danificar o equipamento, porém não recomenda-se para o uso contínuo.
Olá sou iniciante no ramo.
Fiz o esquema certinho e o arduino assim como os componentes estão bem alimentados na voltagem e amperagem certa. Mas não consigo parear com o aplicativo.
Ja fucei e tudo, fiz e refiz o projeto. Mas no final não faz o pareamento.
Boa Tarde Carlos! O pareamento deve ser realizado junto ao Smartphone antes de utilizar o aplicativo, ative o bluetooth, pesquise pelo módulo e após pareá-los vá até o aplicativo e conecte o mesmo. Vale lembrar que este módulo utilizado não é compatível com sistema iOs, apenas Android.
No programa ele pede para ligar no pino 2 (comunicação bluetooth) nodesenho ele liga o RX – TX. em qual devo ligar?
Bom dia Adriano!
Os pinos para comunicação do Bluetooth são os respectivos pinos TX e RX o pino 2 do Arduino é declarado como um pino de interpretação de dados, um pino referência para auxilio da comunicação Bluetooth.
Olá, gostei muito do projeto porém tenho uma dúvida. Qual a duração média da bateria?
Boa tarde Marcos!
A duração média da bateria de acordo com o modelo que irá utilizar, existem pilhas alcalinas, pilhas de zinco carbono e demais modelos que variam de acordo com a marca. Infelizmente não temos um tempo estipulado de funcionamento para o projeto.
Gostei muito do Projeto, mas gostaria de pedir uma ajuda, pois estou usando uma Sensor Shield V5.0. Apesar de que estou me baseando muito no artigo não consigo faze-lo com o Sensor Shield. Se tiver uma Dica Agradeço
Olá Ederson!
A maior dificuldade durante o desenvolvimento de um projeto está na alimentação do mesmo, neste caso, você está atribuindo uma alimentação externa para o Shield, que consequentemente alimentará os motores?
Caso a resposta seja sim, você removeu o jumper que possibilita tal funcionalidade?
Verifique as especificações do shield e dos demais produtos utilizados e atribua ao projeto as tensões correspondentes e necessárias, acredito que seja este o problema.
Boa tarde,
Estou realizando o projeto descrito porém com Motor Shield L293D Driver Ponte H para Arduino, contudo alguns erros vêm acontecendo e gostaria de resolvê-los:
-Ao carregar a programação para a placa um erro é verificado:A pasta .github é falsa na biblioteca ‘Adafruit Motor Shield library’
-Outra questão é que ao retirar o cabo USB da placa, o sensor desliga
-E a última, mesmo ligado no computador e nas baterias, sensor funcionando, celular pareado ao sensor do carrinho, ao dar comando no aplicativo o carrinho não anda.
Muito obrigado
Boa tarde Heitor!
A substituição de equipamentos pode ser desenvolvida sem problemas, porém a alimentação diferenciada de cada modelo deve levada em consideração para adaptações.
A alimentação via bateria 9V para o Aruino pode ser a mesma, porém o shield necessita de uma alimentação além desta, comumente é utilizado baterias assim como em nosso projeto.
Os problemas que estão ocorrendo podem ser devido à falta destas pilhas ou devido ao fato destas pilhas estarem fracas e não oferecendo alimentação suficiente aos motores.
Obs.: Lembre-se de retirar o jumper PWR que possibilita alimentação externa para os motores.
Bom dia, montei o carrinho. Tudo funcionou, menos as luzes de Frente e Ré. Conforme o APP as referência é “W” e “U”.
Abaixo informo as linhas que add ao Scketh:
else if (state == ‘W’) { // Se o estado recebido for iguala ‘W’, aciona Luz Frente
digitalWrite(luzfrenteE, 1);
digitalWrite(luzfrenteD, 1);
else
digitalWrite(luzfrenteE, 0);
digitalWrite(luzfrenteD, 0);
Boa Tarde Carlos!
Ficamos felizes em ver que está melhorando o nosso projeto.
Quanto ao problema que está acontecendo com o seu código, ao invés de 1 no código coloque HIGH e ao invés de 0 coloque LOW.
Verifique se alterando esta informação o código funciona.
Bom dia. Estou observando o código e a montagem (esquema) e fiquei com uma dúvida. No trecho inicial de definição dos pinos de utilização, a última linha é
const int BTState = 2; // Define o Pino 2 como o pino de comunicação do Bluetooth.
mas o pino 2 no esquema está desligado. Em diversas linhas do trecho loop() do código existe
digitalRead(BTState)
Como opino 2 está desligado e BTState é igual a 2, como o Arduino reage aos comandos do Bluetooth?
Boa Tarde Luiz!
Neste caso por não existir o pino de verificação ele desconsidera a informação, não interfere em nada no projeto, é apenas uma função a mais que o código possui, porém para o desenvolvimento do nosso projeto não à utilizamos.
Olá, estou fazendo um projeto semelhante a esse, sou estudante de eletrônica ,para teste utilizei o mesmo código fornecido no site ,porem não tive resposta alguma dos comandos.
Boa Tarde Joel!
Você seguiu todos os passos? Utilizou o mesmo aplicativo? Pareou o bluetooth com o celular e conectou o aplicativo com o Arduino?
Teoricamente, se todos estes passos foram seguidos, o problema pode estar ou na sua conexão ou na alimentação que pode estar baixa e impossibilitando o acionamento dos motores.
esqueceram de falar que o modulo bluetooth, o Rx trabalha com 3.3v, e as portas digitais do arduino são 5v, no caso o que falta ai é um divisor de tensão, para chegar os 3.3v no rx do módulo, não liguem sem esse divisor de tensão
Bom Dia Leandro! Muito bem observado, alguns fóruns na internet recomendam um divisor de tensão para alinhamento do nível lógico na utilização do Módulo Bluetooth, no projeto desenvolvido utilizei o Modelo citado e o carrinho funcionou normalmente, sem apresentar qualquer dano, submeti o carrinho a vários testes e constatei que possivelmente com o tempo as empresas tenham integrado já ao módulo estes resistores. O modelo comercializado pela Usinainfo funciona normalmente no esquema apresentado, não se preocupe.
Boa tarde.
Estou com problema nos motores que não gira fica fazendo apenas um ruído, que varia de acordo com comando dado pelo App.
Oque pode está ocorrendo ?
Boa Tarde Lucas! Possivelmente pode ser as baterias que estejam fracas e não estejam dando conta do disparo de acionamento dos motores, sugiro que troque as pilhas e caso não seja isto, verifique a conexão dos seus jumpers assim como a soldagem dos fios do porta pilha que podem estar com problema também.
Matheus.Tudo bem. Estou com problema de delay na execução do comando. exemplo quando mando virar para direita demora quase um minuto para o carrinho virar as rodas. o quê pode ser?
Boa Tarde Nilton! Infelizmente isto não é um erro comum de se observar, de acordo com o código disponibilizado junto a este artigo, o tempo de resposta é quase que instantâneo, caso não tenha alterado o delay em nenhuma parte do código verifique a possibilidade de algum problema no sistema de comunicação bluetooth, isto ocorre apenas com os comandos esquerda direita ou com o comando da buzina frente e trás também?
Bom dia Matheus. Montei o projeto porém os comandos do APP ficaram invertidos. Ao dar comando de esquerda ou direita o carrinho vai para frente ou para trás e comando para frente e para trás o carrinho vai para os lados. Poderia me ajudar?
Bom dia. Problema corrigido. Tive que inverter a ligação dos motores.
Bom dia,
Reparei que o gnd que vai no driver também vai no gnd do arduino.
Gostaria de saber porque o gnd das pilhas do driver e o gnd da bateria do arduino devem ficar em comum (juntos)?
Boa Tarde Larry! O que acontece, quando integramos dispositivos que irão trabalhar juntos e simultaneamente, sempre precisamos manter uma alimentação comum entre eles, por isto sempre mantemos o pino negativo em comum entre todos os dispositivos. Sem isto os dados não teria uma mesma referência e trabalhariam de maneira desordenada e causando divergências em seu funcionamento.
ola tudo bem?
tenho um carrinho de controle remoto que esta com o circuito queimado
pensei em desenvolver um ccto e appps android e arduino
ele tem os 4 movimentos e farois na frente e traz alem de buuzer
como posso proceder?
Boa Tarde Marcio! Através do aplicativo que indicamos neste artigo, você o controle de todas estas informações, porém claro teria que consultar a tabela de códigos do aplicativo e fazer as devidas alterações no esquema, no caso a inclusão dos LED, por exemplo.
Muito interessante o projeto, mas fiquei com uma dúvida.
Poderia substituir o conjunto de pilhas por uma placa fotovoltaica?
Olá Claudio! É possível trocar as pilhas por uma placa voltaica, porém deve levar em consideração todas as especificações, uma vez que a corrente precisa ser contínua e suficiente para a alimentação dos motores e a tensão possivelmente deva ser controlada por um regulador de tensão.
Olá, eu estou usando todas as peças necessárias. E já consegui passar a programação para o arduino, e consegui fazer o buzzer funcionar quando usa o celular, mas não consegui fazer os motores funcionarem quando estou no aplicativo pelo celular. Tem algo que possa estar errado?
Olá David! Me parece que o seu problema está na alimentação dos motores, você está utilizando o esquema apresentado, com uma bateria para alimentação do Arduino e 4 pilhas para alimentação do módulo? Caso esteja, estas baterias são novas e estão com carga suficiente para o acionamento dos motores?
Ainda tem esse produto pra venda?
Olá Lucas! Segue o link do produto disponível para venda no site da Usinainfo: https://www.usinainfo.com.br/robotica-educacional/carrinho-arduino-controlado-por-smartphone-montado-e-pronto-para-uso-pl200a-v2-3757.html
Bom dia,
fiz a busca do app no play store usando o “Bluetooth RC Controller”, mas não consegui identificar qual seria o APP correto. voce poderia me ajudar a encontrar o app correto?
Olá Jesse! Segue link do app que utilizei para o projeto: https://play.google.com/store/apps/details?id=braulio.calle.bluetoothRCcontroller&hl=pt_BR&gl=US
Eu coloquei resistor de divisor de tensão p/ 3.3v no RX e o carrinho não funcionou,tirei os resistores e funcionou.
Porque?
Olá tudo bem?
Podem ocorrer por causas como o nível de tensão (3,3v) ser muito baixo para o arduino identificar como nível logico alto.
outra causa que pode ocorrer são: mal contato entre os resistores, velocidade alta de comunicação entre arduino e modulo e podem ocorrer erros.
Uma solução possível seria utilizar um conversor de nível logico, inclusive temos em nosso site.