


O Comedouro automático é um projeto de automação residencial que vai agradar a todos que tem um cuidado todo especial com os seus Pets, seus cachorros e gatos em específico jamais ficarão desamparados.
Comedouro Automático com Arduino
Este modelo de tratador foi desenvolvido para possibilitar que as rações armazenadas em um recipiente próprio fossem liberadas em horários específicos, o que garantiria aos seus animais receber seu alimento mesmo quando você estiver ausente.
Podendo ser alterado para qualquer horário através de seu código, o comedouro automático possui um módulo para armazenagem de data e hora que possibilita dispensar ração duas vezes por dia, ou se necessário e desejado, mais vezes em menor quantidade.
O controle de alimenta desprezado pelo tratador para pets é feito através de um controle de tempo de acionamento de um motor, o qual atribuímos movimentos horários e anti-horários com a finalidade de evitar possíveis problemas de funcionamento.
Comedouro Automático com Arduino
O projeto do comedouro automático foi desenvolvido para quem gosta dos seus animais, mas as vezes não pode se fazer presente por algum momento, sabemos que a alimentação dos nossos animaizinhos assim como a nossa é de suma importância para o seu desenvolvimento.
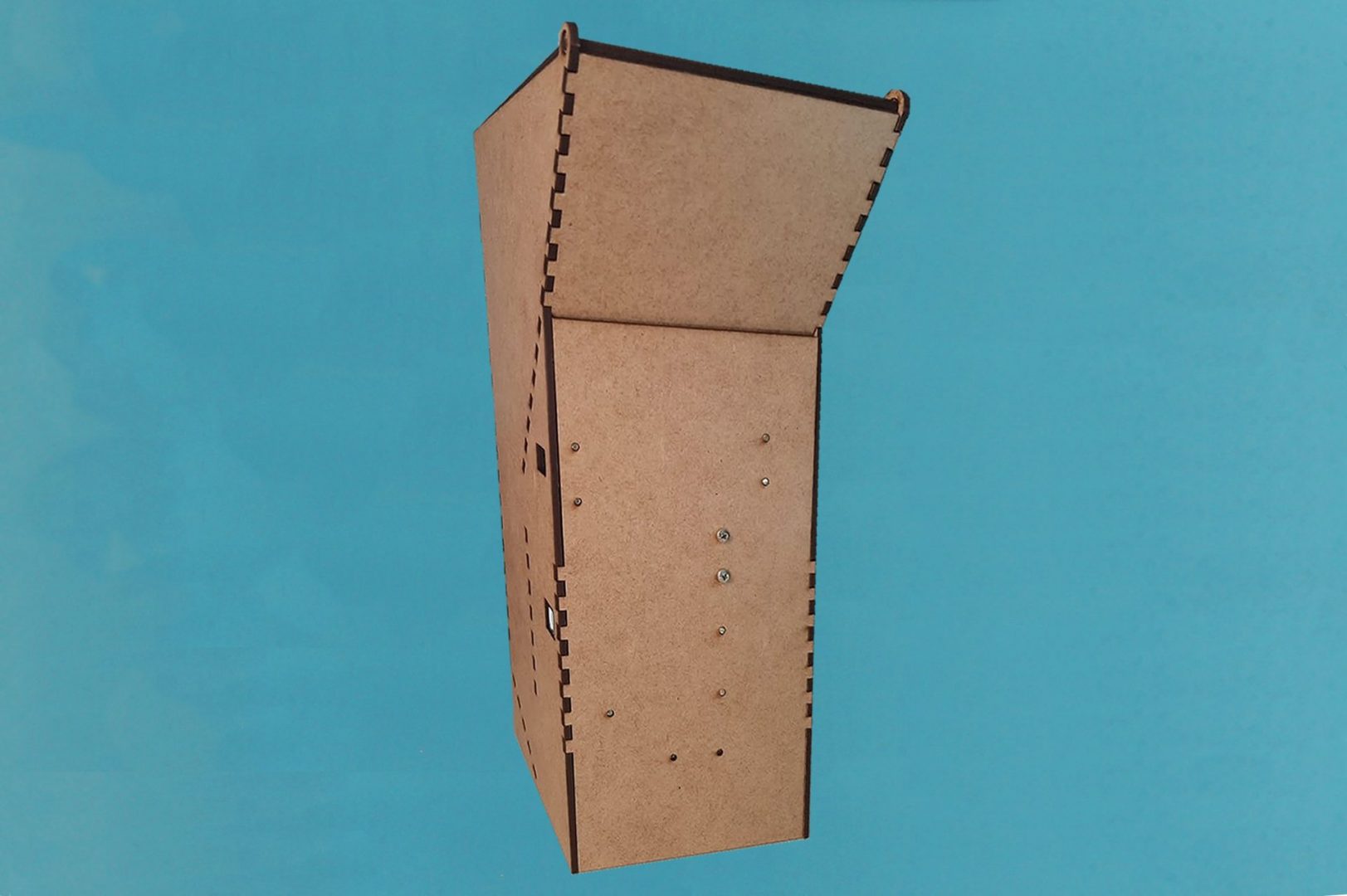
Contando com um reservatório exclusivo para ração com um sistema de pás para extração do alimento, o tratador automático possibilita que os alimentos saiam do reservatório e caiam diretamente no pote de ração posicionado abaixo do case MDF.
Reservatório de armazenagem da ração e pás do Comedouro
Para facilitar a utilização do case, o mesmo possui exclusivas furações para a fixação em paredes através de parafusos, a altura de instalação deve ser feita de acordo com cada caso, porém recomendamos que não seja feito muito acima do pote de ração para que a mesma não saia do pote durante a queda.
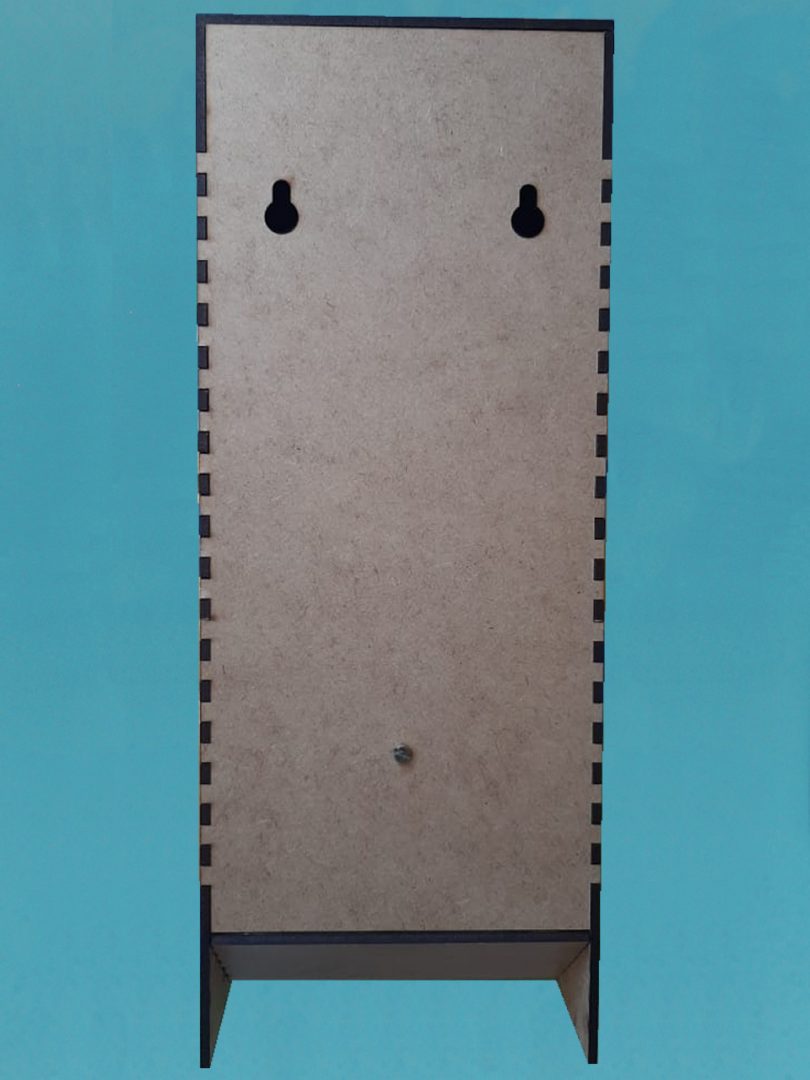
Furos para fixação do Comedouro Automático
Para evitar que o cão tenha acesso à ração, na parte superior o tratador possui uma tampa que abre para frente e evita que o seu animal possa abrir com facilidade o reservatório e coma antes do horário programado.
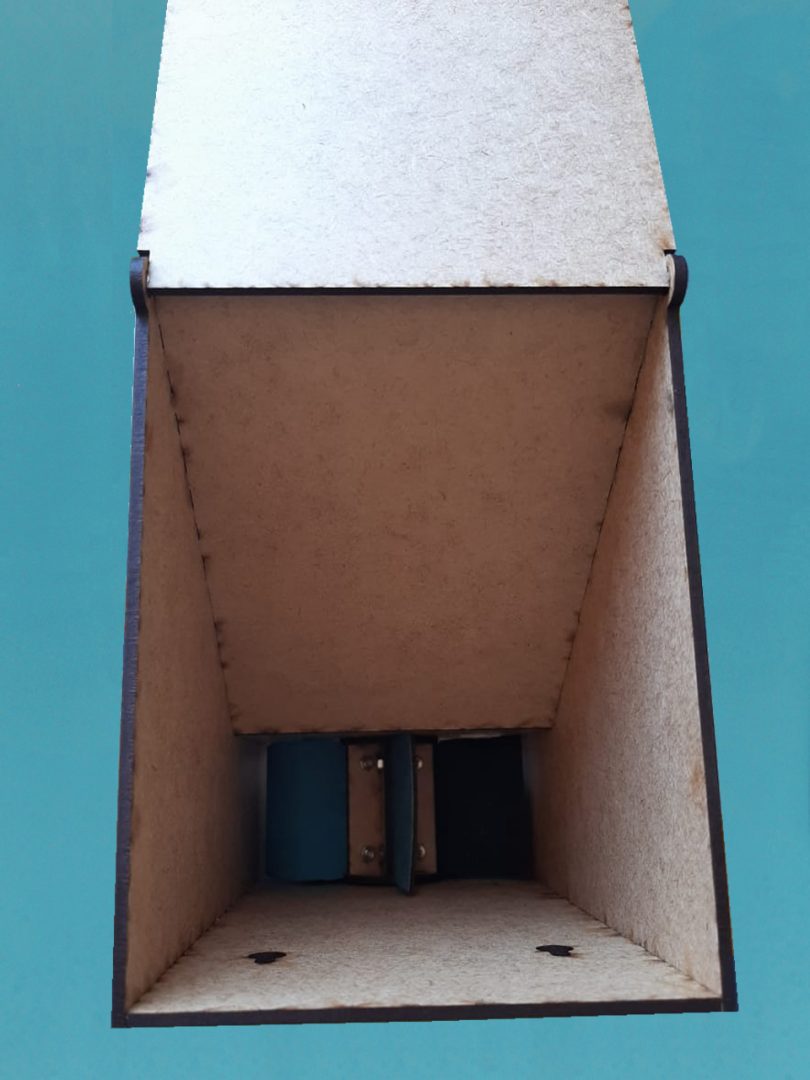
Além disto, o Comedouro possui locais específicos e protegidos para a instalação do Arduino, motor e demais módulos assim como um acesso facilitado ao local de alimentação do módulo e de comunicação de dados do Arduino.
Sistema para Controle de Fluxo do Comedouro
O sistema para controle de fluxo do alimento é composto através de um motor controlado pelo Arduino e um sistema de engrenagem articulado que movimenta as pás de borracha do Comedouro.
O sistema de engrenagem tem a função de aumentar o torque do motor e as pás confeccionadas em borracha tem o intuito de proporcionar maior flexibilidade para o processo de deslocamento e transporte de ração.
Uma das dificuldades encontradas ao produzir este material foi encontrar uma solução que teria força, flexibilidade e resistência para os casos em que a ração ficava entre a parede do tratador e as pás, o que inviabilizava também o uso dos motores que tínhamos disponível.
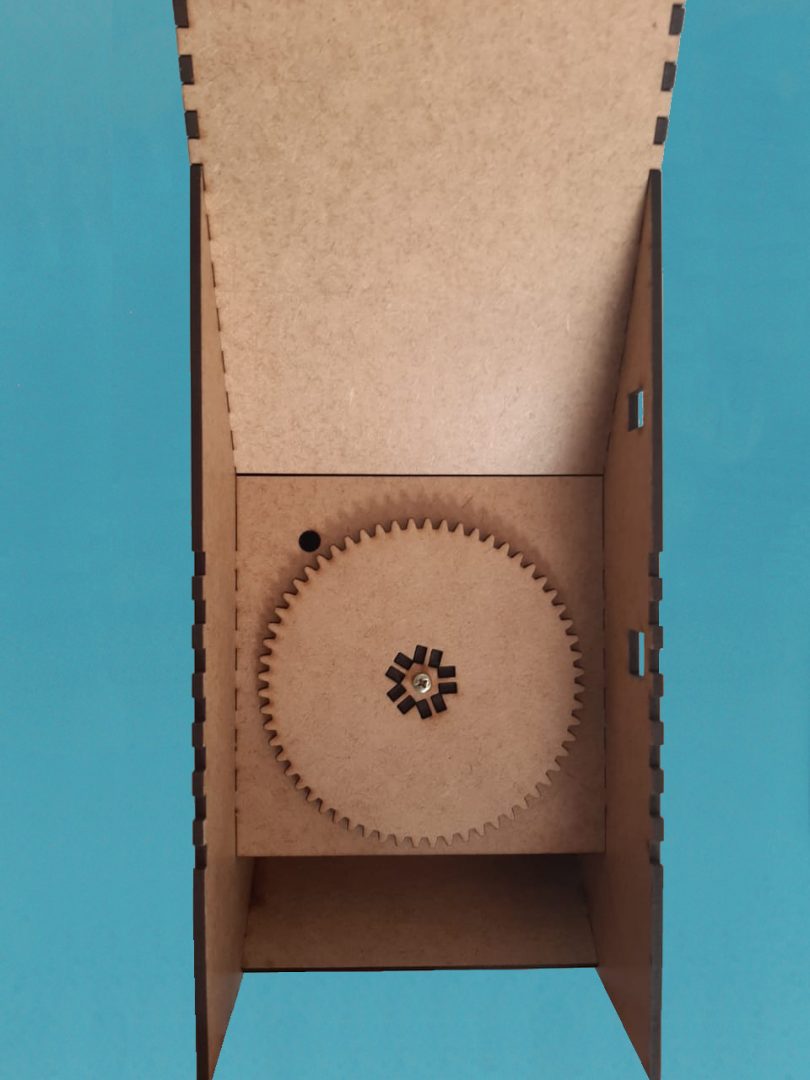
Sistema de engrenagem para aumento do torque
A elevação no torque pelo sistema de engrenagem e a aplicação de um material maleável ainda apresentaram certas resistências periódicas, por isto durante o seu funcionamento, em alguns momentos o motor muda sua direção de rotação para limpar o caminho para as rações.
Sistema para Controle de Acionamento do Comedouro
O controle de acionamento do Comedouro automático é feito através de um RTC, um elemento que acompanha a hora e a data e possibilita o acionamento de dispositivos, por exemplo, em horários específicos.
Maiores informações sobre o Módulo RTC, suas funções ecaracterísticas você encontra através do seguinte artigo:
Módulo RTC DS1307 com Display 16×2 I2C – Relógio Arduino com Despertador
Os dados do módulo relógio tempo real são interpretados pelo Arduino, o qual controla o driver de acionamento do motor DC e consequentemente a sua direção de rotação. É um projeto bastante simples, porém deve-se ter cuidado com a instalação dos jumpers para que não enroscarem do sistema de engrenagem.
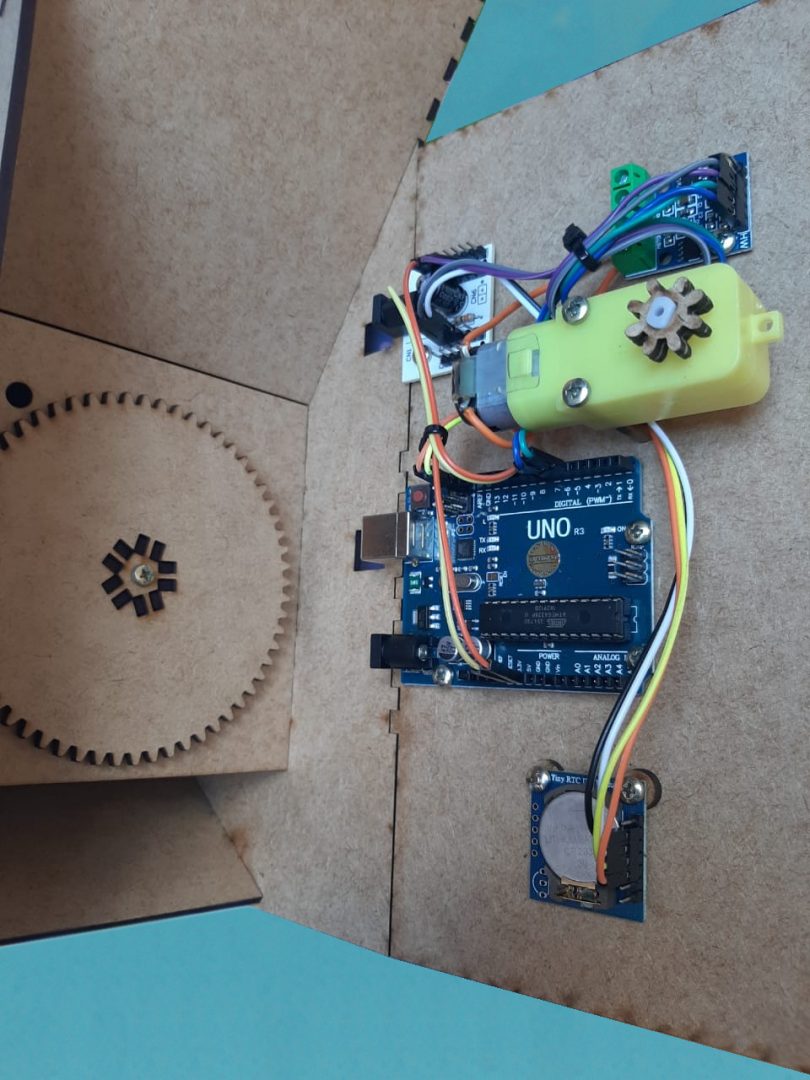
Disposição dos componentes na parte interna do Comedouro
Maiores informações quanto ao sistema de conexão e a ligação dos dispositivos estarão disponíveis logo abaixo.
Produtos Utilizados no Comedouro Automático
Abaixo segue a lista de todos os produtos utilizados no desenvolvimento do projeto e que podem ser adquiridos de forma avulsa conforma listagem. Caso prefira, é possível adquirir a versão completa do Alimentador Automático para Pets com Arduino DIY Canem que possui todas as peças necessárias para sua construção.
– Estrutura MDF para Alimentador Automático Pets Canem;
– Placa Uno R3 + Cabo USB para Arduino;
– Módulo Relógio Tempo Real RTC – DS1307;
– Bateria CR2032 3V de Lithium / Pilha CR2032;
– Driver Duplo Ponte H de motor DC ou Passo L9110s;
– Motor DC 3-6V 80RPM com Caixa de Redução 120:1;
– Extensor de Portas 0 a 6V 10 Saídas com Jack P4 – EPX10;
– Fonte de Alimentação Chaveada 5VDC 2A;
– 11 Parafuso Philips M3 x 6mm Metálico;
– 2 Espaçador Metálico Sextavado de Bronze M3 x 15mm PCB – Fêmea x Fêmea;
– 2 Parafuso Philips M3 x 25mm Metálico;
– 25 cm Cabo Flexível TiaFlex 5m – 0,50mm² – Preto;
– 6 Jumper Premium para Protoboard Macho-Fêmea 20 cm;
– 4 Jumper Premium para Protoboard Fêmea-Fêmea 20 cm.
Esquema de Ligação Comedouro Automático
O esquema de ligação do Comedouro Automático com Arduino é extremamente simples, o único detalhe mais complicado é a soldagem dos fios no motor que precisa ser feita para garantir a alimentação deste.
Veja o esquema de ligação abaixo:
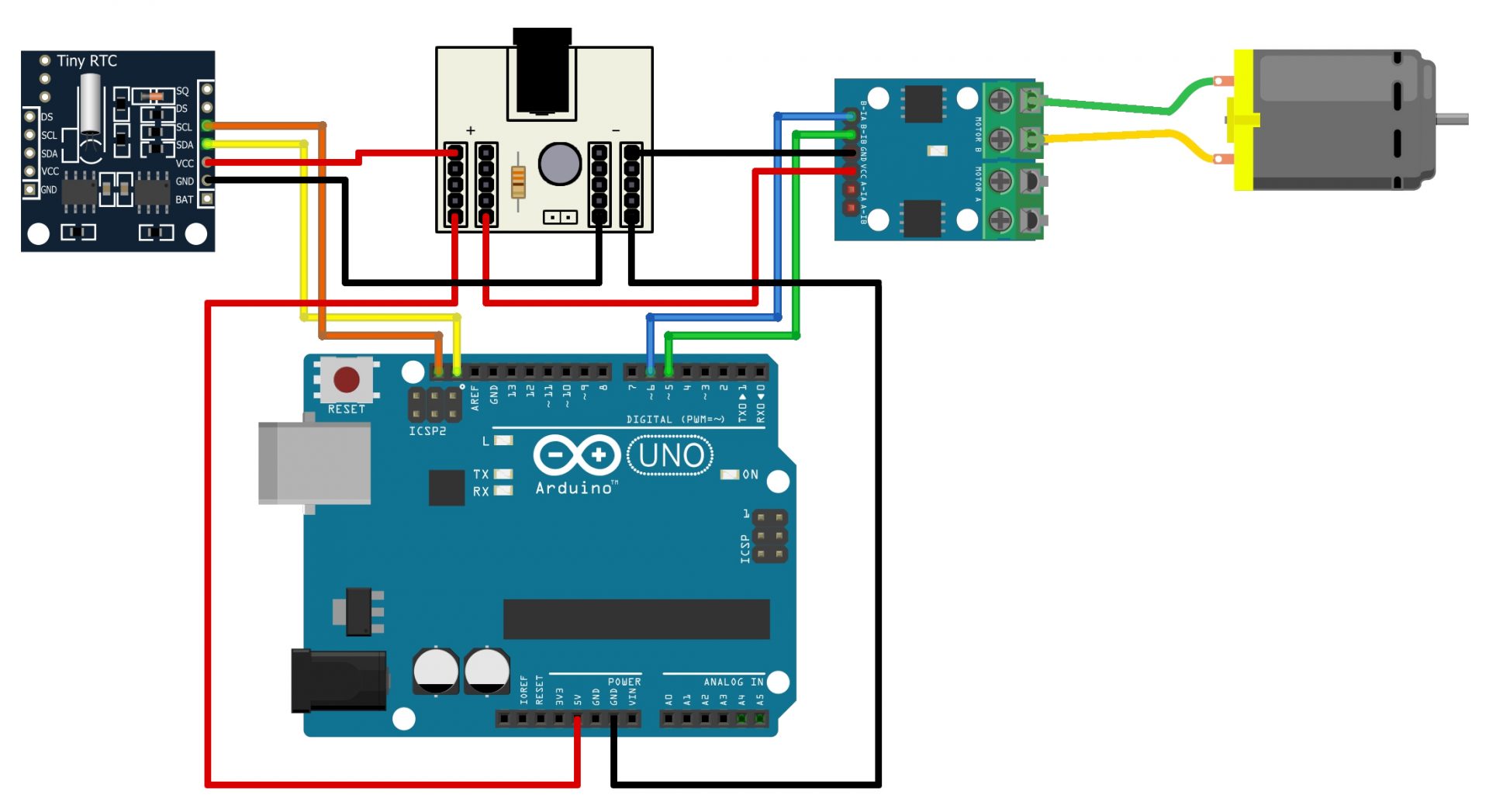
Esquema de Ligação do Comedouro Automático
Como vemos no esquema de ligação, as conexões são poucas, porém como mencionado anteriormente, é imprescindível que os fios sejam alocados de maneira que fiquei abaixo da altura do motor, isto evitará que estes enrosquem na engrenagem.
DICA: Para segurar os fios e impossibilitar o contato destes, utilizai abraçadeiras de nylon.
Código de Funcionamento do Comedouro
O código de funcionamento do Comedouro Automático é bastante simples, abaixo podemos ver a sua versão completa e com todas as variáveis comentadas, a qual conta com apenas uma biblioteca, a RTClib.
Biblioteca RTClib.h: DOWNLOAD AQUI.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 |
#include <RTClib.h> // Inclui a Biblioteca // Define os pinos de utilização do Driver L298. const int motorB1 = 5; // Pino 5 no B1 do L293. const int motorB2 = 6; // Pino 3 no B2 do L293. RTC_DS1307 rtc; // Inicia variáveis do RTC int Hor; // Define variável Hora int Min; // Define variável Minuto int Sec; // Define variável Segundo int Data; // Define variável Data void setup() { rtc.begin(); // Inicia o módulo RTC pinMode(motorB1, OUTPUT); // Pino 5 é um pino de saída de sinal pinMode(motorB2, OUTPUT); // Pino 6 é um pino de saída de sinal rtc.adjust(DateTime(F(__DATE__), F(__TIME__))); // Ajuste Automático da hora e data //rtc.adjust(DateTime(2020, 04, 16, 10, 00, 00)); // Ajuste Manual (Ano, Mês, Dia, Hora, Min, Seg) } void loop() { Hor = rtc.now().hour(); // Verifica a Hora Min = rtc.now().minute(); // Verifica os Minutos Sec = rtc.now().second(); // Verifica os Segundos Data = rtc.now().day(); // Verifica o Dia // Verifica o horário e se o mesmo for igual à 12:00:00 if ( Hor == 12 && Min == 00 && Sec == 00) { analogWrite(motorB1, 255); analogWrite(motorB2, 0); delay(3000); analogWrite(motorB1, 0); analogWrite(motorB2, 255); delay(2000); analogWrite(motorB1, 255); analogWrite(motorB2, 0); delay(3000); analogWrite(motorB1, 0); analogWrite(motorB2, 0); } // Verifica o horário e se o mesmo for igual à 18:00:00 if ( Hor == 18 && Min == 00 && Sec == 00) { analogWrite(motorB1, 255); analogWrite(motorB2, 0); delay(3000); analogWrite(motorB1, 0); analogWrite(motorB2, 255); delay(2000); analogWrite(motorB1, 255); analogWrite(motorB2, 0); delay(3000); analogWrite(motorB1, 0); analogWrite(motorB2, 0); } delay(1000); // Aguarda 1 segundo e reinicia } |
Após adicionarmos a biblioteca e copiarmos o código acima para o software Arduino, já podemos gravá-lo e utilizá-lo da melhor maneira possível, porém podemos elencar alguns pontos importantes e que podem ser alterados de acordo com cada projeto.
O horário utilizado como padrão de funcionamento do Módulo RTC pode ser definido de duas maneiras, ou do modo padrão em que o módulo utiliza o horário base do próprio computador e que é utilizado neste projeto como vemos abaixo:
|
1 2 3 |
rtc.adjust(DateTime(F(__DATE__), F(__TIME__))); // Ajuste Automático da hora e data //rtc.adjust(DateTime(2020, 04, 16, 10, 00, 00)); // Ajuste Manual (Ano, Mês, Dia, Hora, Min, Seg) |
Porém caso deseje utilizar o módulo com horário ou data manual devemos remover as barras do ajuste manual e adicionar no ajuste automático, assim poderá definir os parâmetros assim como no exemplo adicionado no comentário. Para o ajuste manual temos que substituir as duas linhas acima pelas duas linhas abaixo:
|
1 2 3 |
// rtc.adjust(DateTime(F(__DATE__), F(__TIME__))); // Ajuste Automático da hora e data rtc.adjust(DateTime(2020, 04, 16, 10, 00, 00)); // Ajuste Manual (Ano, Mês, Dia, Hora, Min, Seg) |
Após regulado o horário padrão de funcionamento do Arduino, o próximo passo é ajustar os horários de acionamento do motor e liberação do alimento através do Comedouro Automático.
O ajuste do horário de acionamento é feito através da linha de programação abaixo e pode ser alterado de acordo com cada projeto substituindo os valores de acordo com o desejado.
|
1 |
if ( Hor == 18 && Min == 00 && Sec == 00) { |
Para a configuração acima vale lembrar que horários menores que 10 utilizamos as unidades sem o 0, por exemplo, para acionarmos o comedouro as 08:09 iremos preencher a linha do código acima da seguinte maneira:
|
1 |
if ( Hor == 8 && Min == 9 && Sec == 00) { |
Após fazermos todos estes ajustes e adaptarmos o nosso comedouro da maneira desejada basta carregarmos o código e instalá-lo no melhor lugar para a alimentação dos nossos pets.
Conclusão
O Comedouro Automático com Arduino é talvez um dos projetos de automação mais especiais uma vez que une o nosso desejo maker com uma grande paixão que são os nossos animaizinhos. Todo cuidado com nossos pets é importante e a sua alimentação é um dos fatores mais importantes.
Com o Tratador que desenvolvemos neste projeto podemos alimentar nossos animais mesmo não estando em casa em horários específicos, porém é um projeto que pode passar por diversas melhorias ainda para torna-lo ainda mais complexo, é possível utilizarmos um sistema wi-fi ou GSM para controle, por exemplo.
Espero que tenham gostado do projeto e não se esqueçam de deixar o seu comentário, sua dúvida e até mesmo a sua opinião.


Gostarde ajuda na hora de copiar o código aqui do blog e colar no IDE e fazer funcionar o comedouro automático. Não sei mexer direto no IDE e por isso gostaria da sua ajuda.
Boa Tarde Carlos! Tendo o Software Arduino aberto, basta copiar o código disponível junto à página do artigo e inseri-lo na IDE do Arduino, lembre-se de apagar todo o conteúdo que tiver na página quando abri-la. Dica: para eliminar a chance de algum caracter indevido, é bom passar o código pelo bloco de notas antes de passá-lo à IDE.
Olá, adorei o projeto!
Gostaria de saber se posso utilizar o Arduino Nano ao invés do Arduino Uno.
Boa Tarde Stela! No projeto a princípio é possível alterar o Arduino pelo modelo Nano, porém vale ressaltar que possivelmente outros detalhes de hardware vão se alterar, quanto ao produto em MDF porém, o Arduino Nano não possui furos para instalação então a sua conexão deveria ser feita junto de uma Protoboard.
Não estou conseguindo carregar o codigo para o Arduino, pois a biblioteca está inválida.
Como proceder?
Bom Dia Stella! As últimas atualizações do Software Arduino tornaram-se incompatíveis com algumas bibliotecas e funções, desta maneira recomendamos a utilização de versões como a 1.6.13, que está sendo testada e mostrando-se compatível com a maioria dos projetos.
Gostaria de adicionar mais comandos para poder através de botões ou teclado matrix e tela LCD poder modificar a programação de numero de vezes que alimenta, hora e tempo de funcionamento. Podes ajudar atualizando este código?
Obrigado desde já.
Boa Tarde Will! Infelizmente no momento estou com bastante projetos em andamento e não estou com condições de desenvolver tais aplicações, porém a sugestão é muito boa e irei anotar para pensar em algo assim que possível. Muito obrigado.
Ten algum video desse projeto en funcionamento ?!
Boa noite Matheus. Comprei o kit e montei tudo. Fiz teste e deu certo exceto o encaixe das duas engrenagens, a do eixo do motor e a engrenagen maior. O outro problema será no momento de fechar a última peça de MDF. Você tem dicas para resolver esses problemas? Obrigado.
Olá Carlos! Seguiu os passos do manual e as engrenagens não funcionam? Sobre a instalação da última peça, ela possui uma certe resistência para encaixe, mas é normal e vale cuidar o local de instalação do Jack na hora de encaixar.
Olá, você poderia me dizer qual foi o aplicativo que você utilizou para montar o esquema do circuito? Eu estou utilizando o Tinkercad (primeira vez), e lá não tem (ou eu que não consegui achar) o RTC, e eu não encontrei uma forma de adicioná-lo.
Olá Rafael! Parte do esquema foi montado através do Fritzing e parte foi feito através do Fireworks, uma vez que o Extensor de portas é um produto exclusivo da Usinainfo e tive que desenhá-lo para conseguir utilizar.
Olá, gostaria de desenvolver esse projeto porém queria saber se seria possível utilizar o módulo NodeMCU Esp8266 ao invés do Arduino utilizado
Olá Theo! Através das devidas adaptações acredito que não tenha problema desenvolver este mesmo código com outro microcontrolador, porém a alteração acarretaria em uma reestruturação no código e na instalação.
Boa tarde….interessante o projeto….ja tinha em mente….mas noa sabia se usava servo…ou motor dc comum….só nao entendi bem….pelas fotos….como funciona o mecanismo de transporte da raçao
Olá.
O projeto “Alimentador Automático para Pets com Arduino DIY Canem” não está mais disponível para venda?
Bom dia Marcelo!
Este projeto não está mais a venda, mantemos no blog para aumentar o leque de possibilidades para makers e criarem seu próprio projeto inspirado neste.