

Neste projeto vamos responder uma pergunta que muitos makers se fazem: Como Inverter Motor DC com Ponte H L298N? Em especial, essa informação é essencial para qualquer pessoa que esteja desenvolvendo algum projeto que envolva motor DC (corrente contínua), pois em algum momento a rotação vai precisar ser invertida.
Se você não utilizar um driver para motor sua tarefa não será nada fácil, precisando de intervenções físicas diretamente nos fios de alimentação, agora se optar por utilizar um driver, como a Ponte H L298N a história será outra, pois sua função é permitir total controle sobre o motor.
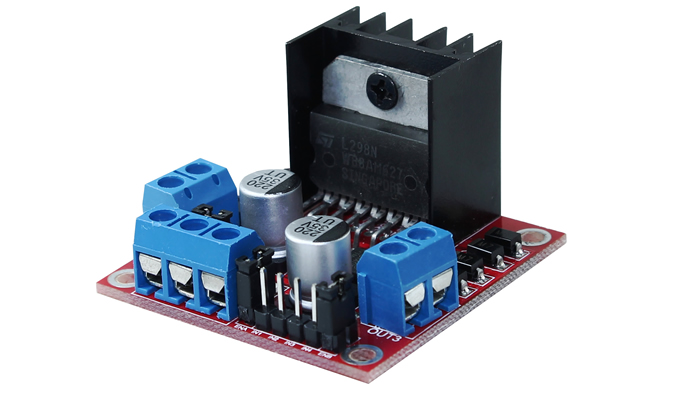
Driver Ponte H L298 para Inverter Motor DC
No exemplo que vamos ver, estaremos controlando dois motores com redução utilizando o Driver Controlador L298N Ponte H, sem necessitar da utilização de quaisquer outros componentes eletrônicos externos, já que placa é completa, além de ter conectores tipo “borne”que tornam mais prática sua instalação.
Em conjunto com o Arduino ou qualquer outro microcontrolador compatível ela é capaz de controlar a velocidade e o o sentido de rotação de motores DC ou de um motor passo, podendo ser amplamente utilizada no desenvolvimento de carrinhos robóticos.
Produtos Utilizados no Teste para Inverter Motor DC
- 1 x Driver Controlador L298N Ponte H;
- 1 x Arduino Uno R3;
- 2 x Rodas com caixa de Redução para Robótica;
- 1 x Kit de Jumpers;
- 1 x Bateria 9v;
- 1 x Protoboard 830 pontos.
Padrões de comunicação
A comunicação do Driver Controlador Ponte H L298 é somente com alimentação de devidos pinos. São quatro pinos de entrada de dados, o pino 1 & 2 giram o primeiro motor, os pinos 3 & 4 giram o segundo o motor, se o pino 1 for alimentado o pino 2 em hipótese alguma pode ser conectado, somente um pino por vez, o pino 1 por exemplo faz o motor girar para um lado, já o pino 2 faz o motor girar para outro lado, o mesmo acontece respectivamente para o segundo motor.
Montagem do Projeto Inverter Motor DC
A montagem é simples basta conectar tudo conforme a figura a seguir e todos os procedimentos vão dar certo. Lembramos que o uso da protoboard é apenas para facilitar o teste, ele pode ser removida do projeto tranquilamente, apenas faça as devidas conexões para não alterar as características técnicas necessárias.
Os pinos de dados do Drive Ponte H são ligados respectivamente Drive – Arduino: IN1 – 4; IN2 – 5; IN3 – 2; IN4 – 3. O terminal negativo da bateria deve estar conectado ao GND do Arduino, o conector positivo da bateria será conectado ao pino “Vin” do Arduino, os motores estão diretamente ligados nas saídas do Drive Ponte H.
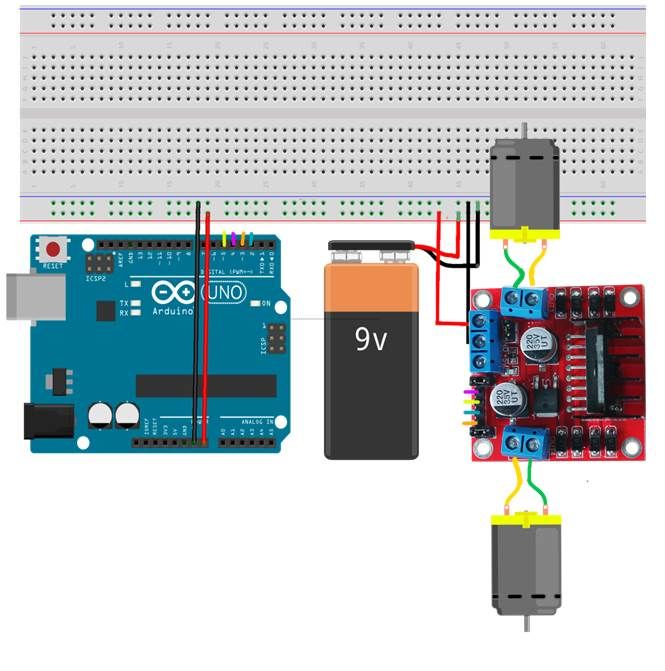
Esquemático de Como Inverter Motor DC com Ponte H L298
Código de Programação
O código foi desenvolvido para que os motores girem 2 segundos para um lado e 2 segundos para o outro lado, assim invertendo a rotação dos dois, girando o primeiro motor para um lado e o segundo para outro lado, de forma a permitir verificar toda funcionalidade do Driver Ponte H.
Vale lembrar que ele pode ser livremente implementado para uso em conjunto com sensores e módulos, tornando seu projeto ainda mais incrível e funcional, basta apenas fazer os ajustes de acordo com os materiais escolhidos e sua necessidade.
Download do Programa Principal
[crayon-69e1a8900b2aa586647531/]
Conclusão
O Projeto Como Inverter Motor DC com Ponte H L298N foi muito prático, permitindo que fosse possível aliar teoria e prática, apresentando perfeito funcionamento durante todos os testes realizados.
Para conectar motores de maior potência (máximo 2A) você deve colocar alimentação via baterias ou fonte de alimentação de maior corrente, já que a alimentação incorreta para o motor vai afetar negativamente o desempenho do driver ponte h l298, bem como do motor, prejudicando seu projeto.
Reforço o alto desempenho que ela apresentou, e verifiquei que nela existem capacitores para melhorar a “arrancada” dos motores, a qual característica passa a aumentar a vida útil da pilha/bateria.
Autor: Leonardo Dalla Porta