

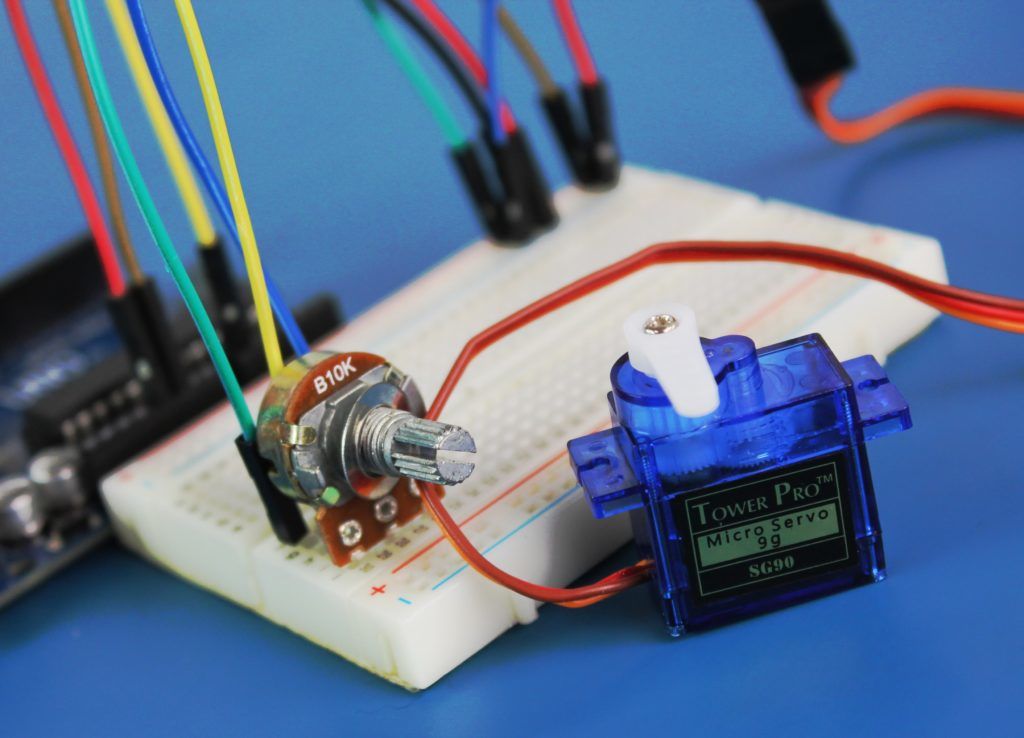
O Controle de Posição Servo Motor com Arduino é uma tarefa comumente aplicada por makers no desenvolvimento de projetos, onde utilizam o Micro Servo Motor SG90, que é o motor preferido por profissionais e projetistas que trabalham com o desenvolvimento de projetos robóticos através de sistemas microcontroladores como, por exemplo, Arduino, PIC e AVR.

Controle de Posição Servo Motor com Arduino
Diferencia-se dos demais modelos de servo motores devido ao seu tamanho reduzido e sua fácil adaptação nos mais diversificados projetos, podendo ser conectado diretamente ao Arduino para controlar a posição do mesmo de forma precisa e regulável ou com algum componente que faça o controle de sua posição, por exemplo, um potenciômetro, trimpot ou botão.
Devido as suas características, o Micro Servo Motor SG90 é bastante utilizado para controlar a posição de objetos, como pernas, braços ou mãos de robôs, movendo sensores com alta precisão e mobilidade, como por exemplo, o Braço Robótico em MDF.
A maior parte dos servos vem com o sequencial de cores marrom, vermelho e amarelo, porém pode ser encontrado nas cores preto, vermelho e branco no qual podemos classificar cada cor da seguinte maneira:
- Marrom ou preto: GND;
- Vermelho: 5VCC;
- Amarelo ou branco: Sinal Digital (PWM).
Teste Prático Controle de Posição Servo Motor com Arduino

Projeto Arduino com Servo
– Neste primeiro projeto vamos utilizar um código exemplo para realizar a movimentação do servo motor através de comandos diretos do microcontrolador Arduino, no qual o servo irá partir do ângulo 0 até o ângulo 180 e após, irá espera 2 segundos e voltar para o ângulo 0.
Produtos Utilizados no Teste
– 1 Arduino UNO;
Montagem Física (Hardware)
Para fazer a ligação correspondente basta observar com atenção o esquema abaixo e reproduzir em seu projeto a pinagem utilizada.
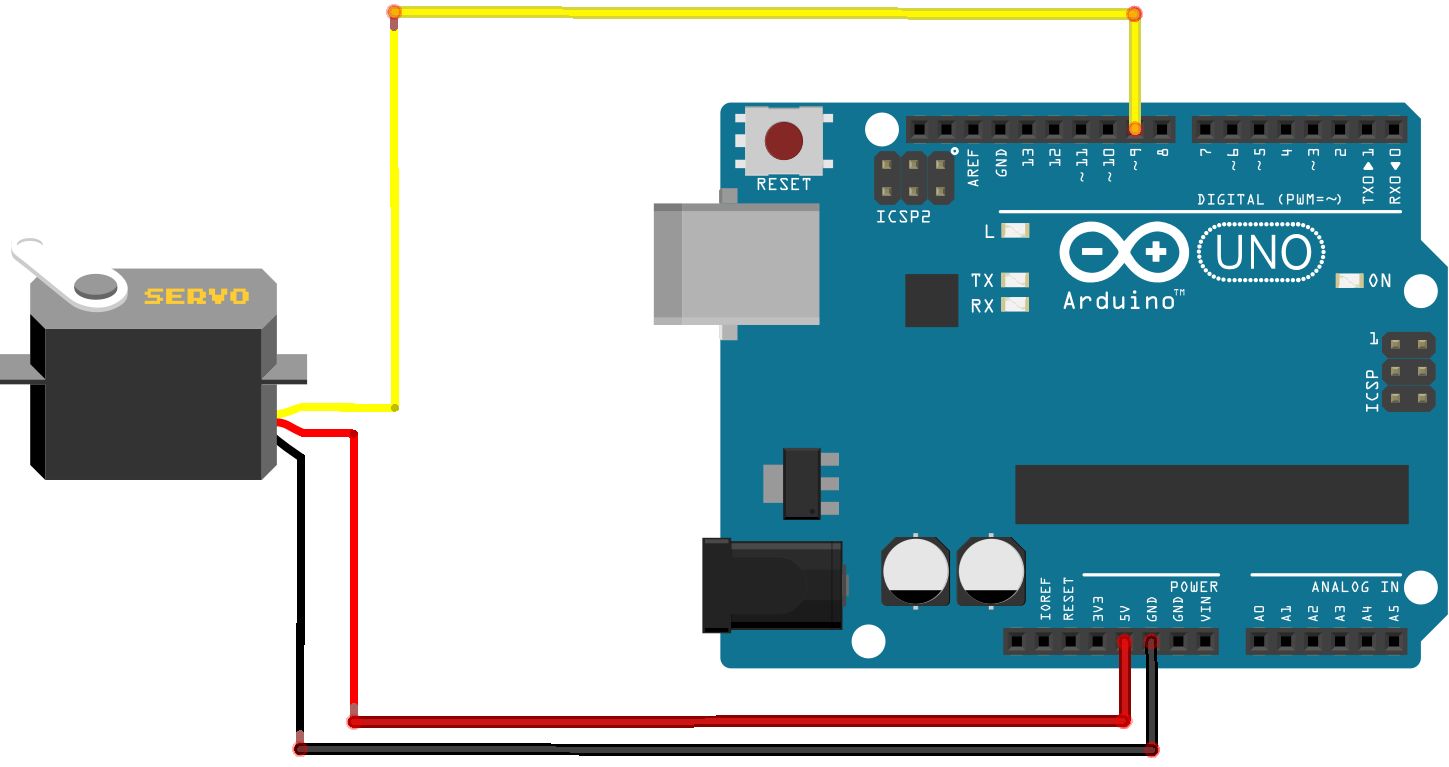
Esquemático Projeto Arduino com Servo
Funcionamento do Programa (Software)
[crayon-69c530ce42b71629892229/]
Projeto Arduino com Servo e Potenciômetro
Neste segundo projeto vamos utilizar um código exemplo para realizar a movimentação do servo motor através de um potenciômetro.
Produtos Utilizados no Teste
– 1 Arduino UNO;
– 1 Potenciômetro.
Montagem Física (Hardware)
Para fazer a ligação correspondente basta observar com atenção o esquema abaixo e reproduzir em seu projeto a pinagem utilizada.
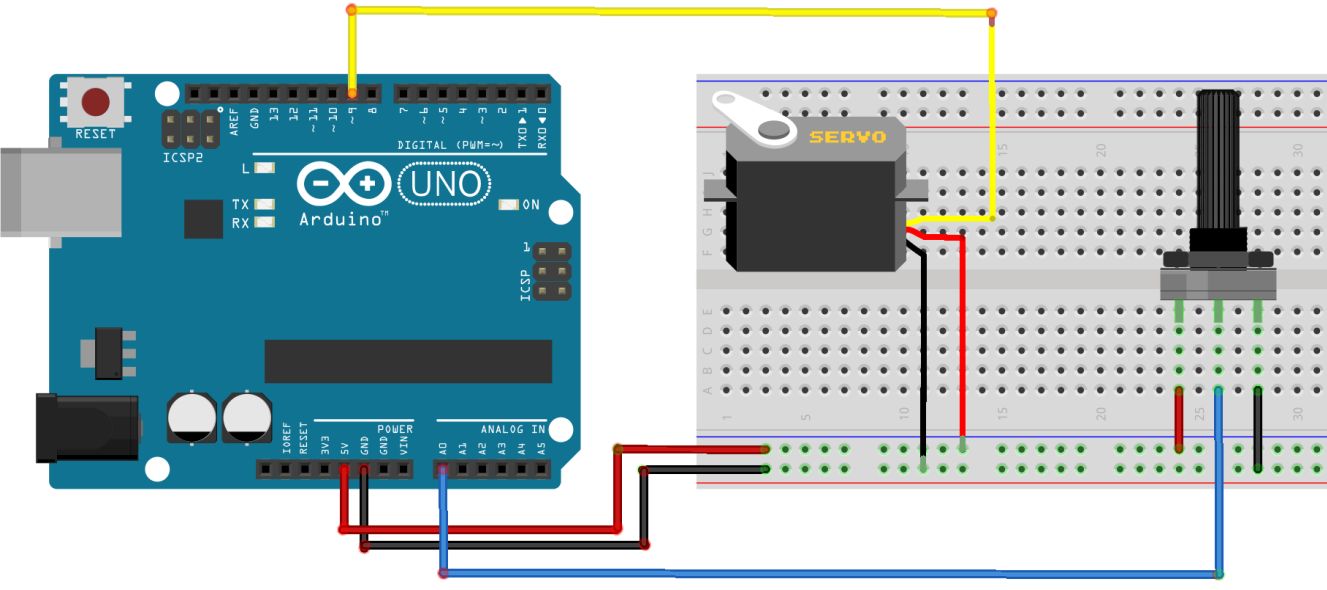
Esquemático Projeto Arduino com Servo e Potenciômetro
Funcionamento do Programa (Software)
[crayon-69c530ce42b79855629453/]
Conclusão
O Controle de Posição Servo Motor é muito eficiente e preciso, especialmente em conjunto om o Micro Servo SG90, por ser considerado um produto de grande funcionalidade que pode ser aplicado nos mais diversificados projetos, no entanto, quando utilizado junto com potenciômetros deve-se ter mais atenção e evitar movimentos bruscos devido à “delay” de comunicação, o que pode acarretar na falha dos movimentos do servo.