


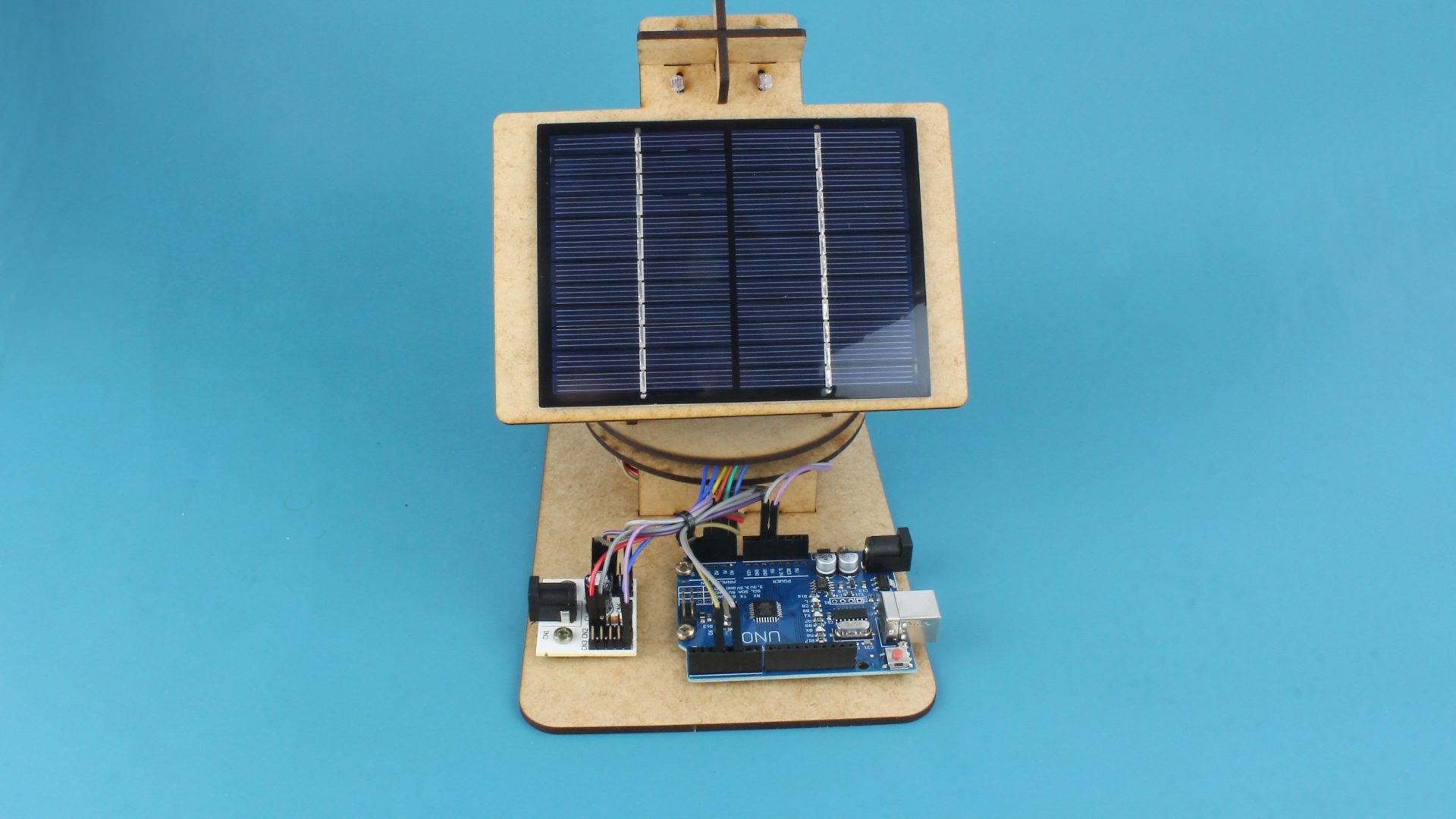
O Rastreador Solar é um dispositivo desenvolvido com o intuito de proporcionar uma melhor qualidade na captação da energia solar através de um exclusivo sistema de rastreamento via Sensores LDR.
Rastreador Solar com Arduino e Sensor LDR
Com a ascensão das energias renováveis e a busca por meios naturais de produção de energia limpa, a captação solar para conversão em eletricidade é um dos métodos que cresce cada vez mais na atualidade.
Ao pensar em métodos para aproveitarmos ainda mais este recurso tão abundante, desenvolveu-se em um projeto o qual pudesse verificar a posição do sol e consequentemente posicionar o painel solar diretamente ao mesmo.
Através de quatro sensores LDR rastreamos a posição do sol e através de dois servos motores controlamos os movimentos na horizontal e na vertical do nosso projeto, tudo isto através de um Arduino UNO que lê, interpreta e executa os movimentos.
Sensor LDR
A sigla LDR vem do inglês Light Dependent Resistor e significa Resistor Dependente de Luz, uma vez que depende de uma variação luminosa para alterar o seu valor resistivo e gerar o sinal necessário para os projetos os quais está integrado.
A parte superior do Sensor LDR é constituída de um material semicondutor com elevada resistência elétrica, apresentando valores próximos à 200k Ohms quando sem incidência de luz.
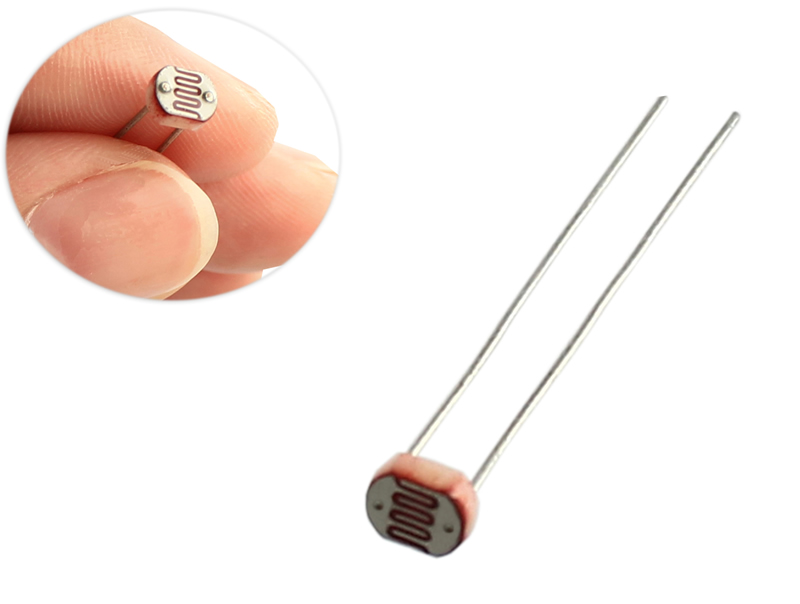
Sensor LDR – Sensor de Variação Luminosa
Ao receber feixes de luz em sua base semicondutora, s fótons do LDR liberam os elétrons e ao aproximarem-se da base condutora, diminuem a resistência e consequentemente aumentam a condutividade entre os terminais.
Em tese, quanto maior for a incidência de luz, menor será o valor da resistência agregada ao Sensor LDR, vale ressaltar ainda, que o sensor em questão opera apenas com espectros de luz visível.
Dentre as principais faixas de luz detectadas pelo LDR estão as cores verde e amarelo, o que torna este sensor tão útil quando falamos em detecção da luz do sol e sistemas de adaptação junto à placas voltaicas.
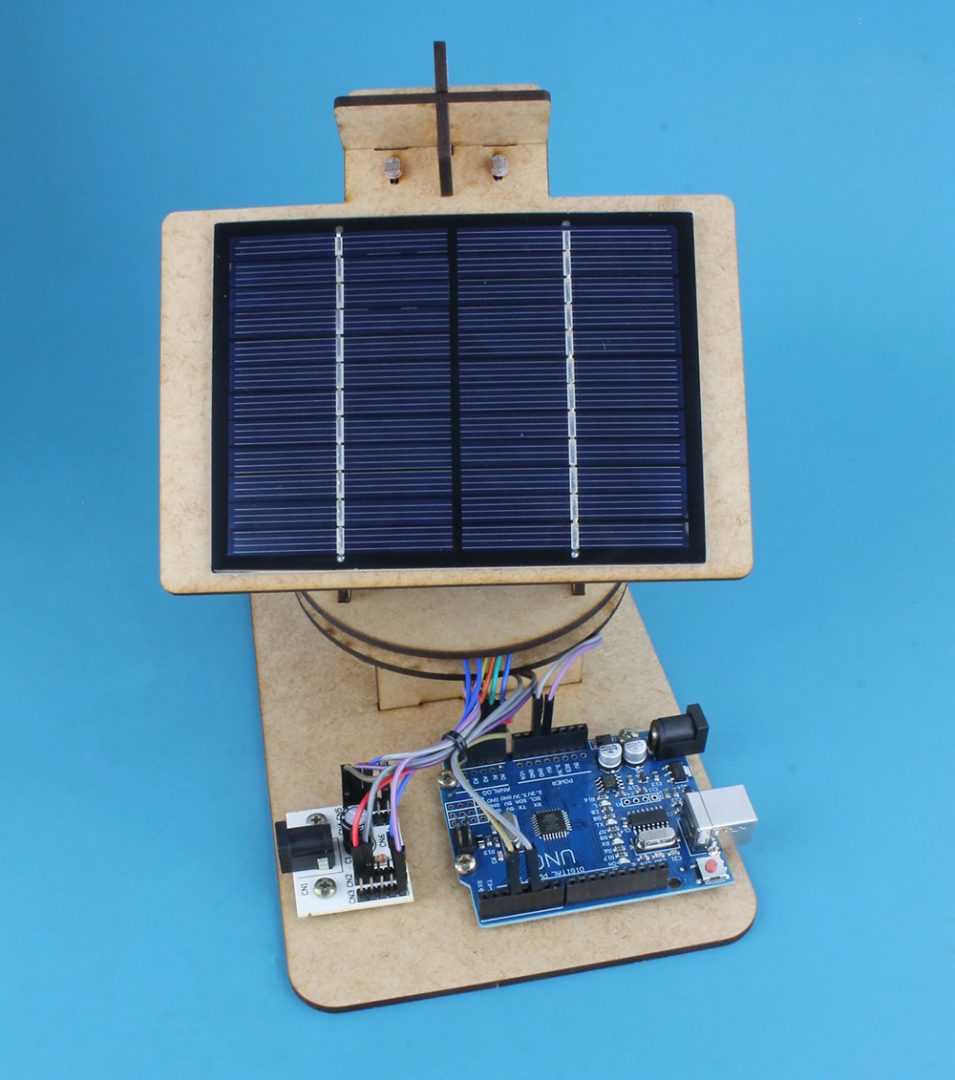
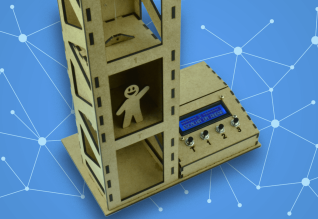
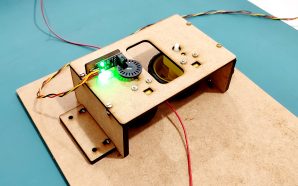
Rastreador Solar – Case MDF
O case do seguidor solar foi desenvolvido de forma que proporcione movimentos tanto na horizontal quanto na vertical para poder acompanhar o movimento do sol detectado pelos sensores LDR.
Os Resistores Dependentes de Luz estão instalados na parte superior junto ao painel solar, o que garante a relação direta entre a verificação do sol e a posição do sol para um local com maior intensidade luminosa.
A instalação dos Sensores de LDR se dá através dos furos posicionados acima do local de fixação do painel solar e contam com exclusivas abas para o desenvolvimento de sombras. Veja abaixo o sistema de verificação do sol com LDR:
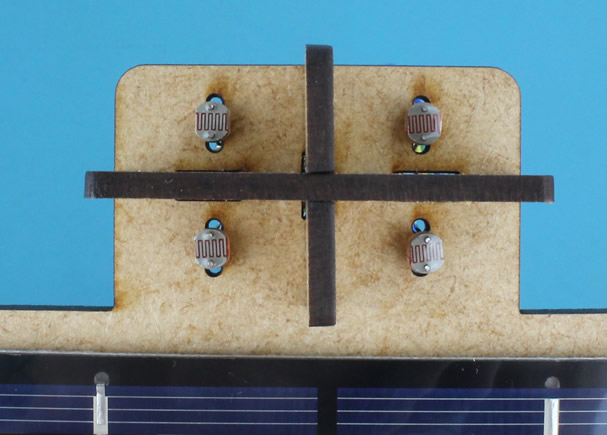
Local de instalação dos LDR com abas de sombreamento
São as sombras geradas pelas abas em determinadas variações do sol que irão proporcionar a diferença de luminosidade necessária entre os sensores LDR para o deslocamento da base em MDF.
A instalação do Sensor LDR neste projeto conta com algumas características próprias, uma vez que a conexão foi desenvolvida de modo a diminuir a quantia de fios no projeto, observe abaixo o esquema de ligação apenas dos LDRs:
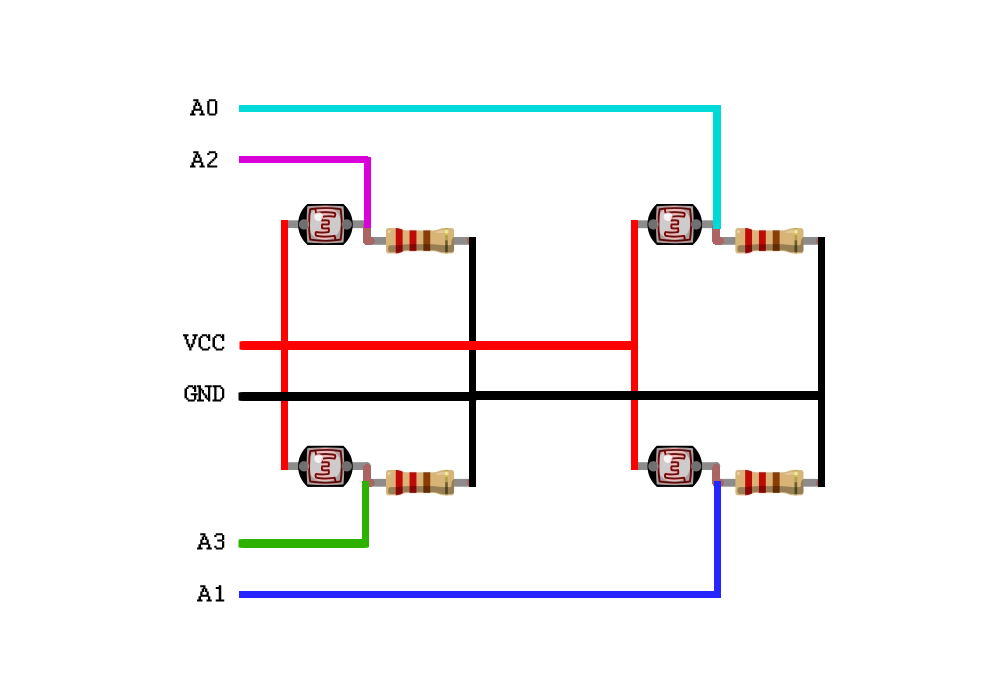
Esquema de ligação dos Sensores LDR
No esquema de ligação acima, podemos observar a inclusão de resistores PullDown conectados ao GND em um dos lados do LDR e a interligação dos terminais positivos do outro, assim como a saída de sinal para os pinos analógicos.
Através da imagem abaixo podemos observar melhor a disposição destes sensores assim como o posicionamento do servo motor de uma visão diferenciada.
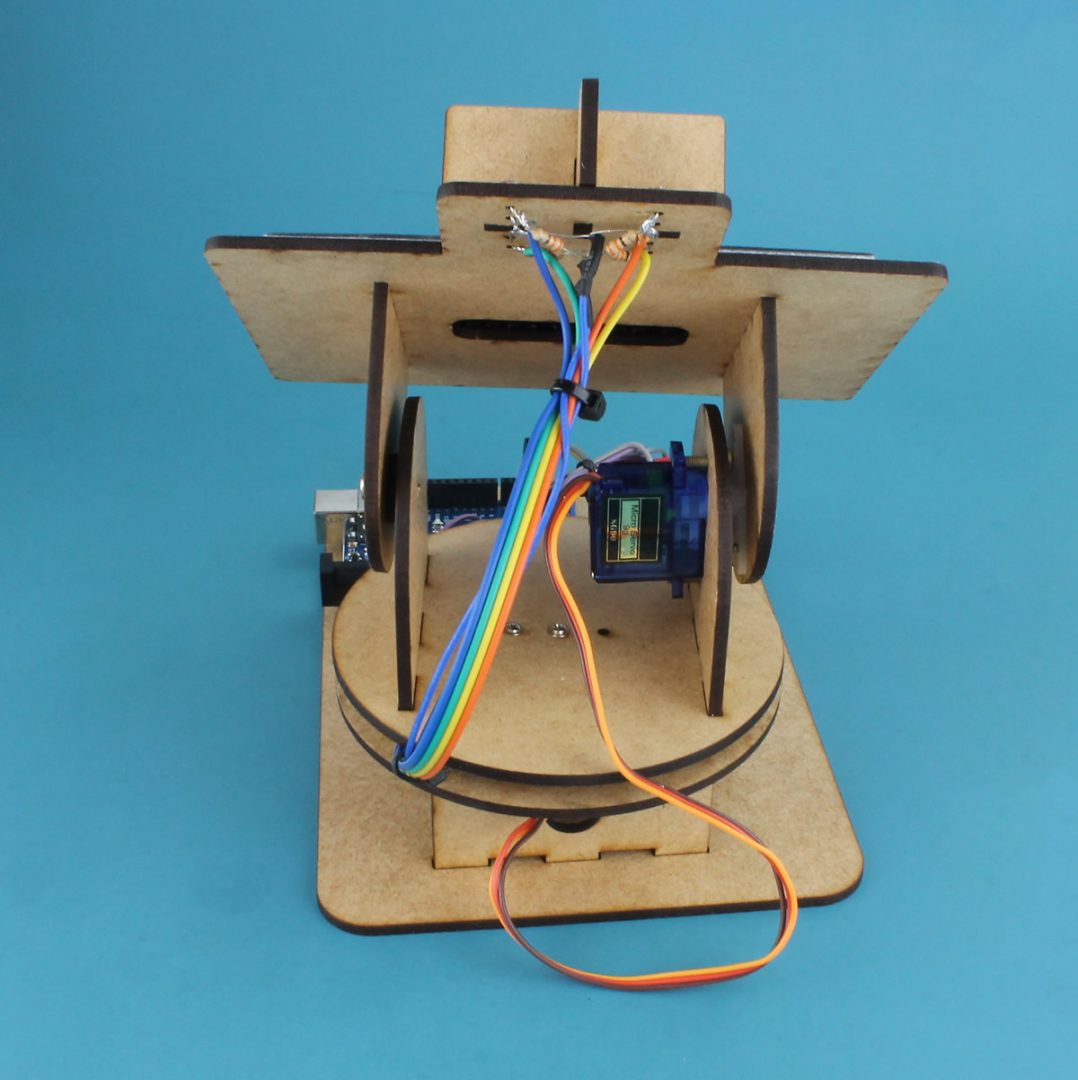
Conexão dos Sensores LDR e Servo Motor
Como podemos ver, em alguns locais foram utilizadas abraçadeiras para realizar a melhor organização dos cabos, porém no fio do servo este procedimento não foi realizado para não interferir na movimentação das bases.
Produtos Utilizados no Projeto
baixo seguem todos produtos utilizados no desenvolvimento do projeto, os quais pode ser adquiridos de forma avulsa conforma listagem. Se você quiser, pode adquirir a versão do Rastreador Solar Arduino Solis Completo, o qual já possui todas as peças necessárias para montagem.
– 1 Placa Uno SMD + Cabo USB para Arduino;
– 1 Mini Painel Solar Fotovoltaico 12V 125mA;
– 1 Estrutura em MDF para Rastreador Solar;
– 2 Micro Servo Motor 9g SG90 180°;
– 1 Extensor de Portas com Jack P4;
– 4 LDR Sensor de Luminosidade 5mm;
– 5 Parafuso Philips M3 x 10mm Metálico;
– 6 Jumper Premium para Protoboard Macho-Fêmea 20 cm;
– 2 Jumper Premium para Protoboard Macho-Macho 20 cm;
– 4 Jumper Premium para Protoboard Macho-Macho 30 cm;
– 2 Jumper Premium para Protoboard Fêmea-Fêmea 30 cm;
– 1 Fonte de Alimentação Chaveada 5VDC 1A.
Esquema de Ligação do Rastreador Solar
O esquema de ligação do Seguidor Solar em questão, conta ainda com mais um Arduino e um Módulo Extensor de Portas para Alimentação, responsável por alimentar o Arduino, os Servos e Sensores.
Anteriormente já vimos uma prévia com a demonstração da ligação dos Sensores de Luminosidade, agora iremos terminar este esquema de ligação ligando-os ao Arduino e realizando a alimentação destes dispositivos.
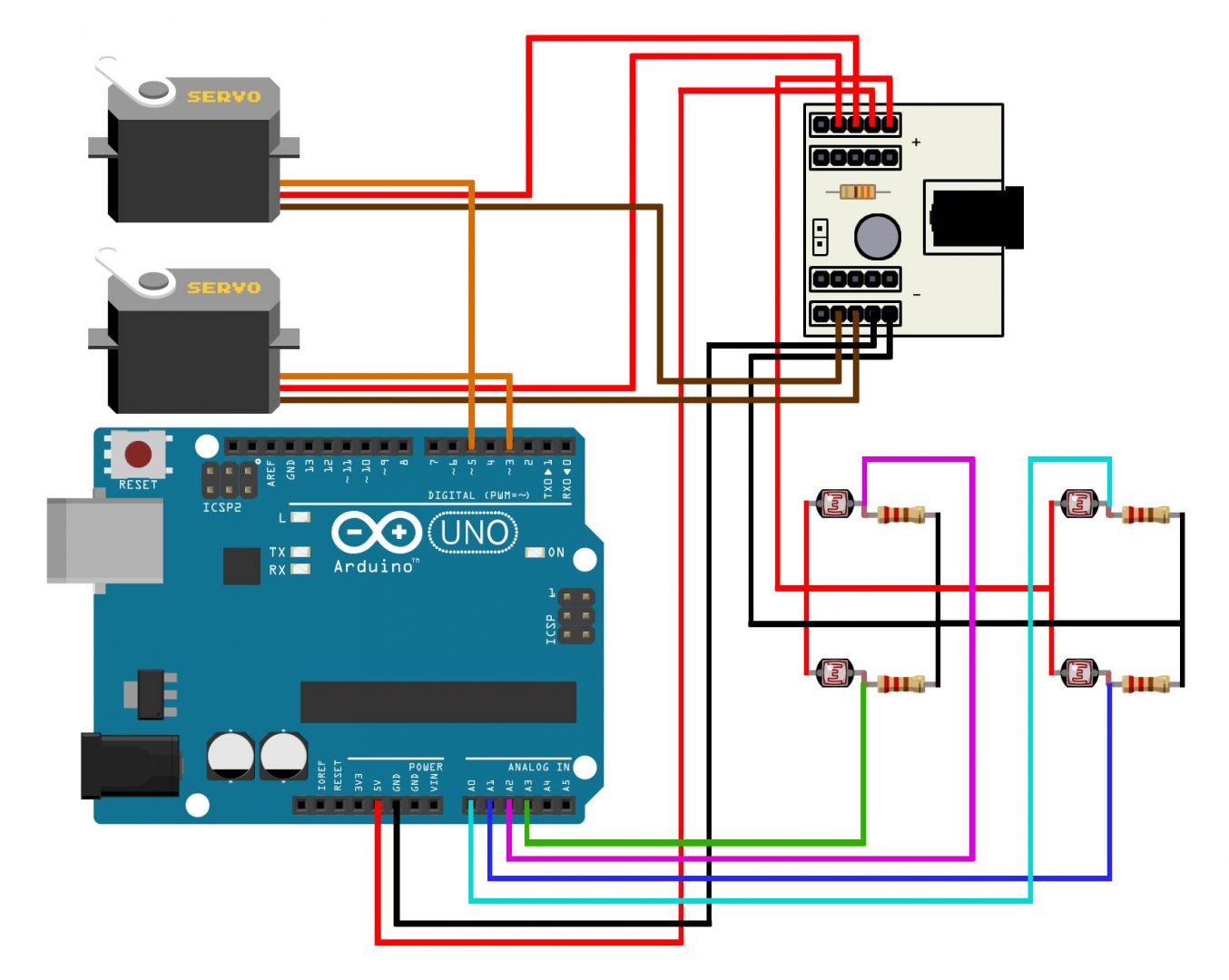
Esquema de Ligação do Rastreador Solar com Arduino
O esquema de ligação pode parecer parcialmente confuso, porém vale observar apenas que os fios de conexão do LDR foram soldados através de jumpers 30cm e demais conexões com jumpers de 20cm. A utilização dos jumpers de 30cm foi realizada com o intuito de agregar maior mobilidade ao projeto.
A posição do Sensor LDR no esquema de ligação acima está distribuída da mesma maneira a qual deve ser instalado no case MDF, superior esquerda e direita e interior esquerda e direita. Obedecer este posicionamento é crucial para o bom funcionamento do projeto.
Código de Funcionamento do Rastreador Solar
O código de Funcionamento do Rastreador Solar é extremamente simples, uma vez que não conta com a inclusão de nenhuma biblioteca com exceção da Biblioteca Servo que já vem instalada junto ao Software Arduino.
O sensor é utilizado com base em suas leituras analógicas individuais e relacionadas uma com os outros através de regras simples de média, diferença e soma.
|
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 33 34 35 36 37 38 39 40 41 42 43 44 45 46 47 48 49 50 51 52 53 54 55 56 57 58 59 60 61 62 63 64 65 66 67 68 69 70 71 72 73 74 75 76 77 78 79 80 81 82 83 84 |
#include <Servo.h> // Inclui a Biblioteca Servo Horizontal; // Inicia o Servo da Horizontal Servo Vertical; // Inicia o Servo da Vertical int ServoHorizontal = 90; // Estabelece valor fixo à ServoHorizontal int ServoVertical = 90; // Estabelece valor fixo à ServoVertical int LimiteServoHorizontalMax = 180; // Estabele os limites de rotação int LimiteServoHorizontalMin = 65; // Estabele os limites de rotação int LimiteServoVerticalMax = 120; // Estabele os limites de rotação int LimiteServoVerticalMin = 15; // Estabele os limites de rotação int LDRDC = A0; // Inicia LDRDC no pino A0 int LDRDB = A1; // Inicia LDRDB no pino A1 int LDREC = A2; // Inicia LDREC no pino A2 int LDREB = A3; // Inicia LDREB no pino A3 void setup() { Horizontal.attach(3); // Inicia servo Horizontal na porta D3 Vertical.attach(5); // Inicia servo Vertical na porta D5 Horizontal.write(180); // Inicia servo Horizontal na posição 180 Vertical.write(45); // Inicia servo Horizontal na posição 45 delay(3000); // Aguarda 3 segundos } void loop() { int LDC = analogRead(LDRDC); // Leitura Analógica do LDR Direita Cima int LEC = analogRead(LDREC); // Leitura Analógica do LDR Esquerda Cima int LDB = analogRead(LDRDB); // Leitura Analógica do LDR Direita Baixo int LEB = analogRead(LDREB); // Leitura Analógica do LDR Esquerda Baixo int tol = 50; int ValorSup = (LDC + LEC) / 2; // Média da leitura dos LDR superior int ValorInf = (LDB + LEB) / 2; // Média da leitura dos LDR inferior int ValorDir = (LDC + LDB) / 2; // Média da leitura dos LDR da direita int ValorEsq = (LEC + LEB) / 2; // Média da leitura dos LDR da esquerda int DifSupInf = ValorSup - ValorInf; // Diferença entre LED superior e inferior int DifDirEsq = ValorDir - ValorEsq; // Diferença entre LED direita e esquerda /*---------------------------------------------------*/ // Realiza a leitura e executa os movimentos referente ao Servo Vertical if (-1 * tol > DifSupInf || DifSupInf > tol) { if (ValorSup > ValorInf) { ServoVertical = ++ServoVertical; if (ServoVertical > LimiteServoVerticalMax) { ServoVertical = LimiteServoVerticalMax; } } else if (ValorSup < ValorInf) { ServoVertical = --ServoVertical; if (ServoVertical < LimiteServoVerticalMin) { ServoVertical = LimiteServoVerticalMin; } } Vertical.write(ServoVertical); } // Realiza a leitura e executa os movimentos referente ao Servo Horizontal if (-1 * tol > DifDirEsq || DifDirEsq > tol) { if (ValorDir > ValorEsq) { ServoHorizontal = --ServoHorizontal; if (ServoHorizontal < LimiteServoHorizontalMin) { ServoHorizontal = LimiteServoHorizontalMin; } } else if (ValorDir < ValorEsq) { ServoHorizontal = ++ServoHorizontal; if (ServoHorizontal > LimiteServoHorizontalMax) { ServoHorizontal = LimiteServoHorizontalMax; } } else if (ValorDir = ValorEsq) { } Horizontal.write(ServoHorizontal); } delay(100); // Aguarda 0,1 segundo } |
O código está totalmente comentado e todas as informações necessárias para a sua compreensão estão incluídas através dos comentários.
De maneira direta, ele irá verificar os LDR de forma individual e após relacioná-los para diminuir o alto índice de variação de dados. Após, irá avaliar os dados obtidos e movimentar o Servo Motor.
Veja em Ação!
Conclusão
O Rastreador Solar é um projeto bastante atual que possibilita a demonstração da captações luminosas e direcionamento para local de posição do sol. É um projeto que visa melhor a captação de raios UV necessários para a conversão do Painel Solar em energia elétrica e posterior utilização.
Este é um projeto base que pode ser utilizado para o desenvolvimento de diversos projetos, a sua aplicação em ambientes externos, por exemplo, torna necessária a inserção de um módulo RTC para reposicionamento no inicio do dia caso chegue a um extremo sem contato solar.
Também é possível incrementar o projeto adicionando uma bateria recarregável ao painel solar e ainda realizar a alimentação do Arduino através desta, o que agregaria mobilidade e independência ao projeto.
Não se esqueça de deixar o seu comentário falando o que achou do projeto e compartilhar as suas experiências e sugestões, assim como as adaptações que desenvolveu em seu projeto.

Perfeito, sensacional, muito bom, vai tornar meu seguidor mais inteligente, gratidão por compartilhar este conhecimento, a muito venho buscando isso,gratidão.
Boma dia Matheus,
Sei que é demais,mas tenho 57 anos e aprendendo arduino. Achei esse artigo sem querer (acho que não existe sem querer).
daí, achei que é coisa de Elon Musk. Queria repetir exatamente o seu. O que queria é,epla imagem,voce fez o corte do MDF
a laser, voce teria esses cortes? Caso sim e possa disponipilizá-lo?
No mais, é parabéns,parabéns. Sucesso para ti.
Obrigado.
Olá Junior! No site da Usinainfo você encontra todas as peças necessárias para o desenvolvimento deste projeto, para comprar apenas as peças em MDF, este é o link: https://www.usinainfo.com.br/robotica-educacional/estrutura-em-mdf-para-rastreador-solar-arduino-manual-de-montagem-6024.html mas se prefere comprar as peças em MDF e tudo o mais necessário para montar o projeto, tem a opção de compra do kit completo através do seguinte link: https://www.usinainfo.com.br/robotica-educacional/rastreador-solar-arduino-solis-completo-manual-de-montagem-6023.html
Olá, estou montando o projeto e estou com dificuldade em entender a ligação dos fios para o funcionamento do projeto
Bom dia Gabriel!
Sugerimos começar com projetos mais básicos com menor quantidade de ligações, para começar a entender as ligações dos fios, para depois pegar algo mais complexo.
Muito bacana, Matheus. Estou começando a aprender eletrônica e já guardei este projeto para executar quando eu tiver o conhecimento adquirido. Bacana. Obrigado.
Gostaria de saber o que significa o int tol = 50;
Você poderia me ajudar?
Olá Daniel! Este valor é utilizado como parâmetro de tolerância e base para o sistema de movimentação do servo, servindo como elemento de comparação para os movimentos.
Comprei o rastreador, mas o mini painel solar veio diferente, bem menor, assim como a base de montagem. O site indicado para o esquema de ligação parece que foi movido, não existe?!
Olá Alberto! Provavelmente a Usina recebeu um lote diferente ou não conseguiu mais o painel que eu havia utilizado anteriormente e alteraram no site deles. Todas as informações necessárias para montagem do projeto estão presentes neste arquivo, incluindo esquema de ligação e código de funcionamento.
Excelente explicação. Meus Parabéns pela capacidade em transmitir teu conhecimento.
Mta luz, proteção e prosperidade. Gratidão!!!
Olá, parabens pelo seu projeto, se me permite uma sugestão de simplificação, vi eum circuito a seculos atrás, totalmente analógico que usava somente um LDR … o truque é posicionar um pequeno anteparo do tamanho de uma moeda na frente do LDR que provoca sombra e o sistema buscar sempre a posição de menor luminosidade incidente.
Olá Celio! Muito obrigado, realmente é uma opção muito boa mesmo, simplificaria bastante e consigo imaginar funcionando sim.
BOM DIA
NÃO ESTOU ENCONTRANDO ESSE KIT PARA VENDA E PERCEBI QUE HÁ 2 TIPOS DE LOTES DE IMPORTAÇÃO
PODE ME INDICAR O MAIS ATUAL E FUNCIONAL ?
OBRIGADO
Olá Paulo! Segue o link do produto disponível no site da Usinainfo: https://www.usinainfo.com.br/robotica-educacional/rastreador-solar-arduino-solis-completo-manual-de-montagem-6023.html
BOA TARDE
APÓS UM DIA ELE VOLTA AO INICIO ?
OBRIGADO
Olá Paulo! Infelizmente este código não possui esta função, mas é uma função realmente útil para incrementar.
Parabéns pelo projeto. Comprei o kit só das peças com o Mdf pois já tenho as demais. Comprei também o kit da casa e o carrinho movido a energia solar. Vamos tentar montar esse sistema seguidor solar para alimentar a casa que funcionará também com um gerador eólico. Assim que der certo vou postar o vídeo. Grande abraço a todos, e vamos continuar aprendendo e compartilhando o conhecimento…
Ola, estou usando esse projeto como trabalho de conclusão de curso e tenho algumas duvidas, fiz toda a montagem mas o servo horizontal vai a posição máxima logo após startar, já verifiquei todas as ligações com multímetro e esta tudo ok. Muitas vezes com o servo vertical ele inverte a rastreabilidade da luz e foge dela ao invés de ir atrás poderia me ajudar
Victor lopes conseguiu resolver esse problema . O meu kit apresta essa falha ! Poderia me ajudar a resolver ?
Deu certo amigo?
Boa noite! Estou utilizando esse projeto como conclusão de curso. Ele Presenta falha!tem hora que ele funciona e tem hora que ele foge da luz e ao procurar a luz na horizontal chega a um determinado momento em que ele fica apenas trepidando e não procura a luz . Poderia me ajudar ? Pois já fiz todos os testes e configuração como no site , mas continua do mesmo jeito !
Sensacional! Em primeiro lugar parabéns pelo projeto.Estou pensando em utilizar somente o conceito em um trabalho do meu mestrado, que é a criação de uma curva de luz solar para comparação com a capacidade de geração em campo. Muito bom!